Slajd48 (16)
AUTONOMICZNE ROBOTY MOBILNE - chodzące (kroczące) -> wybór ...
Roboty jedno i dwunożne:
- problem zachowania równowagi
- stale monitorowa pozycja robota (monitorowanie w czasie rzeczywistym) i na bieżąco korygowana.
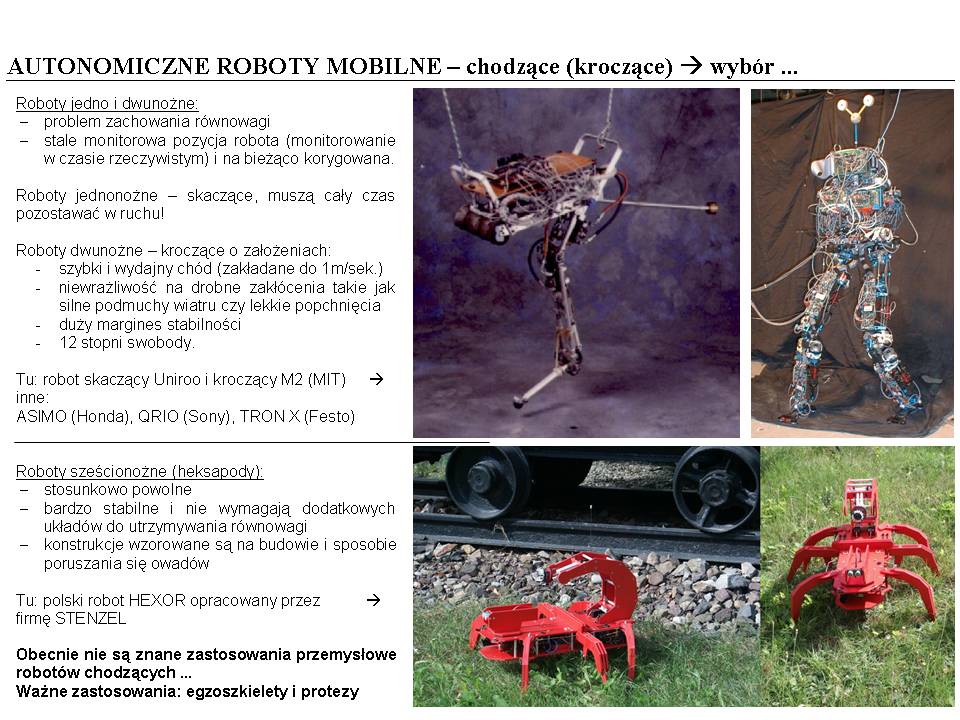
Roboty jednonożne - skaczące, muszą cały czas pozostawać w ruchu!
Roboty dwunożne - kroczące o założeniach:
- szybki i wydajny chód (zakładane do 1 m/sek.)
- niewrażliwość na drobne zakłócenia takie jak silne podmuchy wiatru czy lekkie popchnięcia
- duży margines stabilności
- 12 stopni swobody.
Tu: robot skaczący Uniroo i kroczący M2 (MIT) -> inne:
ASIMO (Honda), GRIO (Sony), TRON X (Festo)
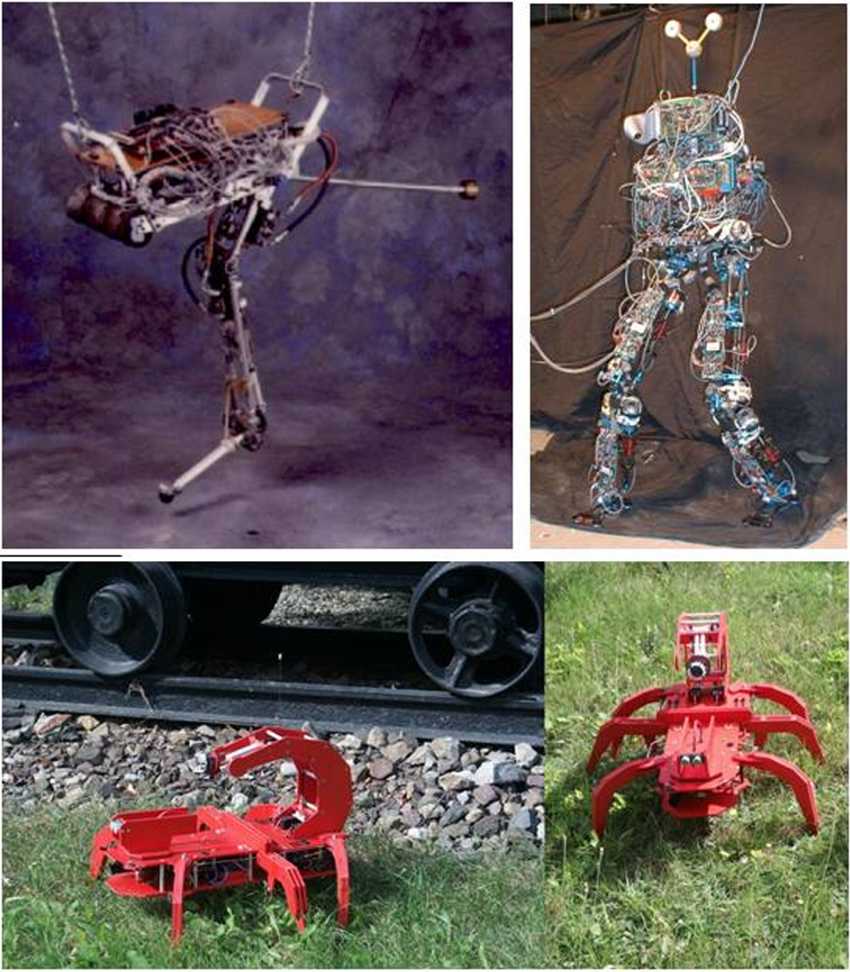
Roboty sześcionożne (heksapody):
- stosunkowo powolne
- bardzo stabilne i nie wymagają dodatkowych układów do utrzymywania równowagi
- konstrukcje wzorowane są na budowie i sposobie poruszania się owadów
Tu: polski robot HEXOR opracowany przez -> firmę STENZEL
Obecnie nie są znane zastosowania przemysłowe robotów chodzących...
Ważne zastosowania: egzoszkielety i protezy
Wyszukiwarka
Podobne podstrony:
Slajd49 (16) AUTONOMICZNE ROBOTY MOBILNE - chodzące (kroczące) inne ...Wspinający się robot inspekcy
Slajd46 (16) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> złożone -4-=- z systemem wielokołowych w
Slajd47 (16) AUTONOMICZNE ROBOTY MOBILNE - pływające -> batyskafy głębinowe Sterowanie i zasilani
Slajd42 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> trzykołowe Zalety Wady (ogólnie) •
Slajd43 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> czterokołowe Zalety Wady •
Slajd44 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> sześcio- i ośmio- kołowe Zalety Wady •
Slajd45 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> gąsienicowe Zalety Wady •
31357 Slajd41 (17) AUTONOMICZNE ROBOTY MOBILNE - klasyfikacja i porównanie cechRoboty jeżdżące: •
slajd50 (15) AUTONOMICZNE ROBOTY MOBILNE - latające -> wybór ... Robot - sterowiec: -
więcej podobnych podstron