31357 Slajd41 (17)
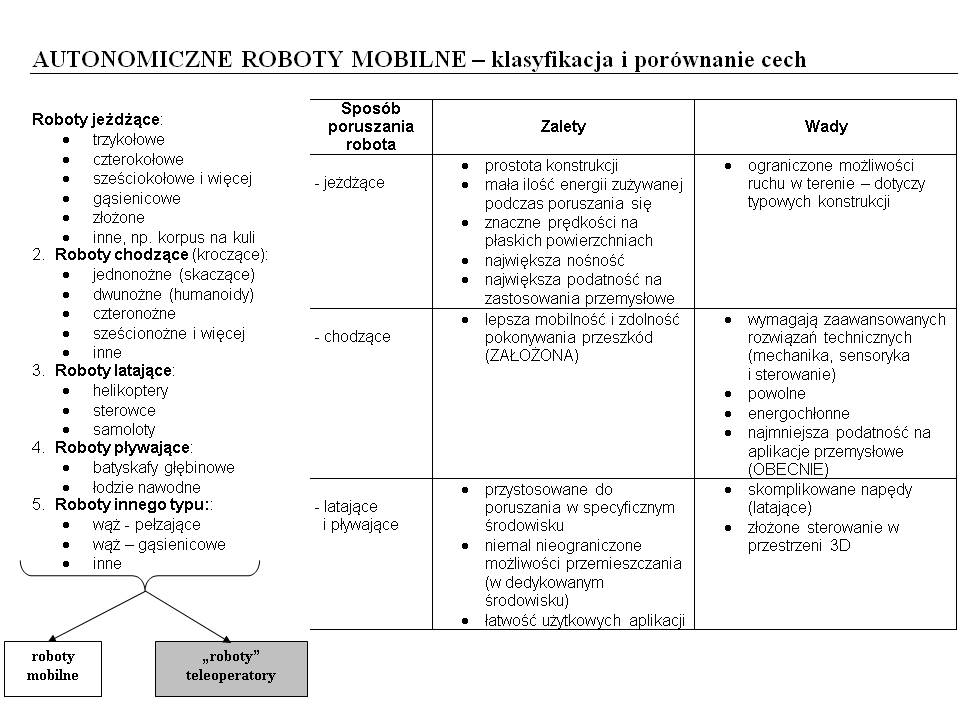
AUTONOMICZNE ROBOTY MOBILNE - klasyfikacja i porównanie cech
Roboty jeżdżące:
• trzykołowe
• czterokołowe
• sześciokołowe i więcej
• gąsienicowe
• złożone
• inne, np. korpus na kuli
2. Roboty chodzące (kroczące):
• jednonożne (skaczące)
• dwunożne (humanoidy)
• czteronożne
• sześcionożne i więcej
• inne
3. Roboty latające:
• helikoptery
• sterówce
• samoloty
4. Roboty pływające:
• batyskafy głębinowe
• łodzie nawodne
5. Roboty innego typu::
• wąż - pełzające
• wąż - gąsienicowe
|
Sposób poruszania robota |
Zalety |
Wady |
|
- jeżdżące |
• prostota konstrukcji • rnała ilość energii zużywanej podczas poruszania się • znaczne prędkości na płaskich powierzchniach • największa nośność • największa podatność na za sto s owa n i a p rze mysłowe |
• ograniczone możliwości ruchu w terenie - dotyczy typowych konstrukcji |
|
- chodzące |
• lepsza mobilność i zdolność pokonywania przeszkód (ZAŁOŻONA) |
• wymagają zaawansowanych rozwiązań technicznych (mechanika, sensoryka i sterowanie) • powolne • energochłonne • najmniejsza podatność na a p 1 i ka cj e p rze my sło we (OBECNIE) |
|
- latające i pływające |
• przystosowane do poruszania w specyficznym środowisku • niemal nieograniczone możliwości przemieszczania (w dedykowanym środowisku) • łatwość użytkowych aplikacji |
• skomplikowane napędy (latające) • złożo n e ste rowa n i e w przestrzeni 3D |
Wyszukiwarka
Podobne podstrony:
Slajd42 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> trzykołowe Zalety Wady (ogólnie) •
Slajd43 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> czterokołowe Zalety Wady •
Slajd44 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> sześcio- i ośmio- kołowe Zalety Wady •
Slajd45 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> gąsienicowe Zalety Wady •
Slajd46 (16) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> złożone -4-=- z systemem wielokołowych w
Slajd47 (16) AUTONOMICZNE ROBOTY MOBILNE - pływające -> batyskafy głębinowe Sterowanie i zasilani
Slajd48 (16) AUTONOMICZNE ROBOTY MOBILNE - chodzące (kroczące) -> wybór ... Roboty jedno i dwunoż
Slajd49 (16) AUTONOMICZNE ROBOTY MOBILNE - chodzące (kroczące) inne ...Wspinający się robot inspekcy
Slajd85 (7) AUTONOMICZNE ROBOTY MOBILNE - Obsługa baz załadunkowych: jeżdżące -> przykłady zastos
Slajd89 (7) AUTONOMICZNE ROBOTY MOBILNE - Indywidualne potrzeby klientów: - jeżdżące -> przykłady
więcej podobnych podstron