Image 017

j
W9-7

i.
»*••• i * *
>
.
i ’
(6.24)
lub inaczej:
i
f
».

Us_=UjN
fs fsN
= const.
(6.25)
*-» i
*

.i

•i
'#
# i
'f
Uproszczoną zasadę sterowania wg. zależności (6.25) można stosować przy większych częstotliwościach (od około 5-10 Hz), gdzie wpływ rezystancji stojana na impedancję silnika jest niewielki (ze wzrostem częstotliwości rosną wartości reaktancji XSCT i Xm).
Zależność (6.9) na moment krytyczny silnika przy pominięciu rezystancji stojana przyjmuje postać:
l
• •» ii
i:
i..
P

* .# • i
i



2/Z/r. / I
-2”fs[Lsa + Lrv
Pb
- const

(6.26)
i
o
Przy stabilizacji strumienia silnika na wartości znamionowej moment krytyczny silnika nie ulega więc zmianie. Przebieg charakterystyk mechanicznych silnika asynchronicznego sterowanego częstotliwościowo przedstawiono na rys. 6.6. W zakresie do częstotliwości znamionowej dopuszczalny moment obciążenia silnika jest niezależny od jego prędkości: jest to zakres sterowania “przy stałym momencie”. Powyżej częstotliwości znamionowej maleje strumień silnika, a więc i jego moment krytyczny. Jest to tzw. zakres sterowania “przy stałej mocy”.
t
•ł
J

Rys. 6.6. Charakterystyki mechaniczne silnika asynchronicznego sterowanego częstotliwościowo
I.
I
i
i
f
i
Sterowanie częstotliwościowe przy zasilaniu ze źródła prądowego
Przy zasilaniu silnika asynchronicznego ze źródła o charakterze prądowym (na przykład z falownika prądu), wielkością sterującą jest prąd stojana silnika Is. Stabilizacja strumienia w szczelina jest równoważna ze stabilizacją prądu Im- Prąd stojana można w tym przypadku obliczyć z otrzymanej na podstawie rys. 6.4 zależności:

(6.27)
W12-2
Przy stałej wartości sem Ef, a więc przy stałej wartości prądu wzbudzenia maksymalną wartość momentu silnik o biegunach utajonych rozwija przy kącie 5 = %12 i jest ona równa:
M
max
(8.5)
Charakterystykę momentu silnika o biegunach utajonych M = f(5) przedstawiono na rys. 8.2.a.
W silniku jawnobiegunowym wartości przewodności magnetyczne w osiach podłużnej i poprzecznej są różne, inne wartość posiadają więc reaktancje w osi podłużnej X<i i poprzecznej Xq. Przy pominięciu strat moment elektromagnetyczny maszyny jawnobiegunowej oblicza się z zależności:


u*fEf
Xs
sin^ +


sin 28
Pierwszy człon tej zależności odpowiada momentowi maszyny z biegunami utajonymi, drugi niezależny od wzbudzenia, powstaje na skutek niesymetrii obwodu magnetycznego i nazywa się momentem reiunktancyjnym. Jest on funkcją sinusoidalną podwójnej wartości kąta obciążenia 5.
Charakterystykę momentu silnika o biegunach jawnych M = f(5) dla różnych wartości prądu wzbudzenia przedstawiono na rys. 8.2.b. Silnik o biegunach jawnych wytwarza synchroniczny moment napędowy także bez wzbudzenia. Silniki synchroniczne, które pracują tylko z momentem reiunktancyjnym nazywane są relunktacyjnymi. Budowane są tylko dla bardzo małych mocy.

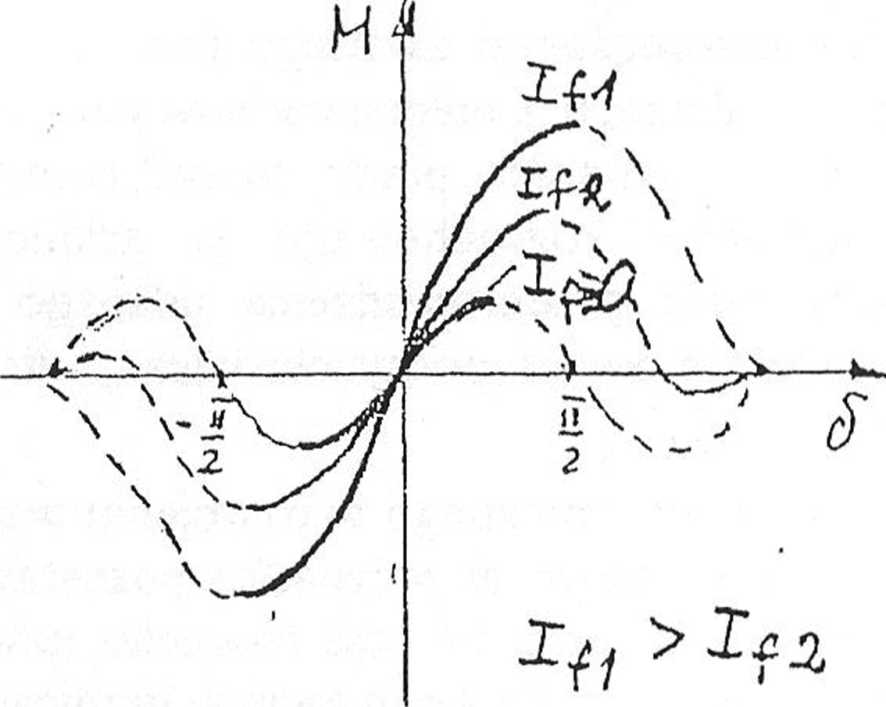

Rys. 8.2. Charakterystyka momentu silnika z biegunami utajonymi (a) i jawnymi (b) w zależności od kąta obciążenia 8 dla różnych wartości prądu wzbudzenia
Przeciążalność silników synchronicznych:
^max
M
Pm = ~
N
Przy przekroczeniu przez moment obciążenia wartości Mmax silnik wypada z synchronizmu. Zjawisko to może nastąpić także przy mniejszych wartościach momentu obciążenia przy jego szybkich zmianach, na skutek tzw. zjawiska kołysania. Silnik synchroniczny pod względem dynamicznym jest bowiem układem oscylacyjnym tłumionym.
Wyszukiwarka
Podobne podstrony:
image 017 Charakterystyka, promieniowania 17 Rys. 1.5. Przykładowa charakterystyka kierunkowa promie
Image254 y(s) = h(s) = G(s) ■1 = 4 S y(t) = h(t) = k ■ t dla u(t) = 1 (t) lub y(t) = h(t) = k ■ u,*
skanuj0101 Zmywarki tunelowe ■ Zmywarki tunelowe lub inaczej tunelowe maszyny
skanuj0003 (606) turystyka farmerska (wypoczynek na farmie), turystyka ekologiczna lub inaczej ekotu
skanuj0101 Zmywarki tunelowe ■ Zmywarki tunelowe lub inaczej tunelowe maszyny
Photo2503 Wybuch lub inaczej eksplozja chemiczna jest to gwałtowna reakcja chemiczna połączona z&nbs
1. Kursy walut i transakcje na rynku walutowym jej podaż, lub inaczej, gdy podaż waluty zagranicznej
WPŁYNĘŁO dnia ......... POZNAŃ, dnia 24 kwietnia 2013r. US
YCbCr (lub inaczej YUV) to sposób zapisu kolorów za pomocą trzech wartości liczbowych opisujący
34 Część I. POJĘCIA ł KATEGORi; kompozycji. Te pierwsze, zwane .Reprodukcją prostą^ (lub inaczej
Podsumowanie Prewencja pożarowa utożsamiana w pożarnictwie z profilaktyką lub inaczej zapobieganiem
więcej podobnych podstron