Image0007 BMP
ys. 1.1. Wersory w układzie współrzędnych prostokątnych (a), w uklacl/ic współrzędnych .walcowych (b) oraz w^, układzie współrzędnych kulistych (c)
s. l.lc). Wektor A w układzie współrzędnych prostokątnych można przedstawić w poci
A^A^+Arly+Ath. (1-1)
Iloczyn wektora A o składowych Ax, A,., A. przez skalar X jest wektorem AA o skła-.vych X,Axt XAy, XAZ.
.2. Funkcja wektorowa. Pole wektorowe
Przypuśćmy, że w każdym punkcie obszaru v określony jest wektor A, wobec czego on funkcją trzech zmiennych przestrzennych .r, y, z, czyli A (jc, y, z). W ogólnym ypadku wektor A może zależeć jeszcze od czasu /. Otrzymuje się w ten sposób funkcję ■torową A (*, y, z, t), która jest równoważna trzem funkcjom skalarnym: Ax (jt, y, ), Ay(x,y, z, t) oraz At(x, y, z, t), przedstawiającym poszczególne składowe wek-t. Funkcja wektorowa określona w pewnym obszarze przedstawia pole wektorowe yrn obszarze. Funkcję wektorową A (jc, y, z, t) będziemy często oznaczać A (P, i), ie P jest punktem o współrzędnych jt, y, r.
Unią pola wektorowego lub krótko linią pola nazywamy krzywą, której styczna ma unek wektora pola w tym punkcie. Polem równomiernym nazywamy pole, w którym tor pola jest stały, czyli ma stalą wartość liczbową (miarę) oraz stały kierunek i zwrot, ie pola równoramiennego są prostymi równoległymi.
1. Iloczyn skalarny i wektorowy
loczynem skalarnym AB wektorów A i B nazywamy skalar równy iloczynowi ich ości (miar) przez cosinus najmniejszego kąta zawartego między tymi wektorami,
A-B = /1Bcosk. (1.2)
bólem mnożenia skalarnego jest kropka. Iloczyn skalarny wektorów prostopadłych ly jest zeru.
locz.yn skalarny podlega prawu przemienności, wobec czego
Wctsory w uKłud/ir współrzędnych pro-itokątnych mają następuj qcc właściwo**:
1, 1.-S I, -i,
(1.4)
l‘i/y wykorzystaniu tych zależności łatwo udowadnia się, że iloczyn skalarny wektorów A i H wyra Aa się wzorem
AB = AxBK + A,Br + AtBx. (1.5)
Kwndial wektora określony jest wzorem:
A2 = A • A = /42 +A* + A*. (1.6)
W-iirow (miara) wektora jest równa
A — | A| = s/A • A = \ł A2 + Ay + Ay (1-7)
i odpowiada długości wektora.
Iloczynem wektorowym A x B wektorów A i B nazywamy wektor, o wartości (mierze) mwnej polu równolcgloboku rozpiętego na wektorach A i B, o kierunku prostopadłym dn lycti wek torii w oraz o zwrocie przyjętym w ten sposób, aby wektory A, B i AxB two-Myly układ prawoskrętny (rys. 1.2). Wartość (miara) iloczynu wektorowego jest równa
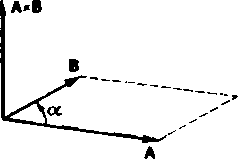
Rys. 1.2. Określenie zwrotu iloczynu wektorowego
AN»in a, przy czym a jest najmniejszym kątem zawartym między wektorem A a B. Sym-bolem mnożenia wektorowego jest krzyżyk.
Iloczyn wektorowy nie podlega prawu przemienności, bowiem
Wersory w układzie współrzędnych prostokątnych mają następujące właściwości:
l*xlj=lyX lJ1=lIxlI = 0,
* « X — I, X lt= I. ,
I*t zy zastosowaniu tyd» zależności łatwo obliczyć iloczyn wektorowy A x B w układzie w ąmlrzędnych prostokątnych; w wyniku utrzymuje się
A x B~(.ir/Jt- A, B,) 1, f(A. Bx~ Ax flj I, t-(AxBr~Ay Bx) I,, (UO)
I «
Wyszukiwarka
Podobne podstrony:
image002 (15) ■ Opis ruchu w układzie współrzędnych XOY. Opisując ruch w układzie współrzędnych XOY
64500 image002 (15) ■ Opis ruchu w układzie współrzędnych XOY. Opisując ruch w układzie współrzędnyc
Układy odniesienia -£b- Położenie punktu w przestrzennym układzie współrzębr walcowych x = rcos co,
Image0035 BMP mi
Image0085 BMP w porównaniu / ich szerokością a. Wprowadzamy układ współrzędnych prostokątnych .v, y,
Praca dyplomowa inżynierska - Polak Sz. W prostokątnym układzie współrzędnych x, y, z, korzystając z
image001 ■ Opis ruchu w układzie współrzędnych XOY. Opisując ruch w układzie współrzędnych XOY trakt
image013 ■ Przyspieszenie w układzie współrzędnych XOY. Rozkład wektora przyspieszenia wygląda
33. W układzie współrzędnych prostokątnych „1942" wyróżnia się 4
z1 15161718 <IU (5 p ) W prostokątnym układzie współrzędnych zilustruj zbiór r
Położenie przestrzenne pkt. P W przestrzennym układzie współrzędnych prostokątnych położenie
dsc00536 (5) — zazwyczaj pod kątem 135° od osi pionowej (w prostokątnym układzie współrzędnych obsza
Slajd6 W prostokątnym układzie współrzędnych ruch ciała sztywnego będzie określony
więcej podobnych podstron