P1080226
4. Wprowadzenie do kinematyki robotów
Wartości /, (Poraź O można obliczyć z zależności
|
1 — +(^4 —1\)* |
(4.28) |
|
sin 0 = ——— / |
(4.29) |
|
cos &=— |
(4.30) |
/
Pokazany przykład jest nieskomplikowany, ale realistyczny. Układ sterowania robota powinien wykonywać obliczenia możliwie szybko, gdyż jest to konieczne do uzyskania odpowiedniej płynności działania robota - obliczenia muszą więc być względnie nieskomplikowane. Trzeba zauważyć, że w powyższym rozumowaniu rozdzielono orientację w przestrzeni od pozycjonowania ramienia, co bardzo upraszcza osiągnięcie właściwego rozwiązania.
4.2.4. Opis kinematyki w notacji Denavita-Hartenberga
Dla robotów o wielu stopniach swobody wyznaczenie prostego lub odwrotnego zapisu kinematyki ruchu manipulatora, wykorzystujące równania algebraiczne, jest zadaniem bardzo pracochłonnym, a z punktu widzenia nakładu pracy - zupełnie nieefektywnym. W celu opisania przemieszczeń, prędkości i przyspieszeń układów kinematycznych, wykonujących złożone ruchy w przestrzeni, stosuje się aparat matematyczny umożliwiający przede wszystkim efektywne obliczenia. Dlatego najwłaściwsze jest podejście macierzowe, które pozwala w sposób jednolity i zwarty formalnie przedstawić problemy związane z mechaniką robota, tzn. opis geometrycznych, kinematycznych i dynamicznych związków między członami manipulatora i obiektami manipulacji oraz algorytmy sterowania. Takim właśnie podejściem jest notacja Denavita-Hartenberga o następujących założeniach:
- robot jest złożony z n członów numerowanych od 0 do n, poczynając od podstawy; podstawę oznacza się jako człon 0;
- przeguby robota numeruje się od 1 do n, stosując zasadę, że przegub oznaczony jako i łączy człon / - lz członem z;
- zmienną przegubową oznacza się parametrem #,•; dla przegubów o ruchu postępowym opisuje ona przemieszczenie, a dla przegubów obrotowych - kąt obrotu;
- do każdego członu należy przyłączyć układ współrzędnych, gdzie podstawę bazową oznacza się jako 0, kolejne zaś układy numeruje od 1 do /z, pamiętając, że układ i jest sztywno połączony z członem /;
- tworzona jest macierz przekształceń jednorodnych oznaczona jako Ab gdzie punkty z układu / są transformowane do wcześniej opisanego układu i — 1; należy pamiętać, że wartości macierzy A/ zmieniają się
_dynamicznie wraz ze zmianą położenia robota w przestrzeni roboczej.
4.2.4.1. Transformacja prosta w notacji Denavita-Hartenberga
Kinematykę każdego robota można określić na podstawie czterech parametrów, które zostały opisane w notacji Denavita-Hartenberga; są to:
- długość członu a/_i,
- kąt skręcenia członu ai~\,
- odsunięcie członu dt,
- kąt konfiguracji #.
Pierwsze dwa parametry opisują człon / — 1, a dwa kolejne połączenie członu z sąsiednim członem i — rys. 4.14.
N rysunku 4.14 przedstawiono człon i - 1 oraz prostą obustronnie prostopadłą do osi dwóch przegubów. Długość członu <?,•_ i mierzy się od punktu przecięcia się prostej obustronnie prostopadłej z osią i — 1 do punktu przecięcia się prostej obustronnie prostopadłej z osią /. Kąt skręcenia członu \ określa względne usytuowanie osi i oraz osi i — 1. Jeżeli wyobrazimy sobie płaszczyznę, której normalna odpowiada prostej obustronnie prostopadłej, a następnie zrzutujemy obie osie na tę płaszczyznę, to możemy zmierzyć kąt zawarty między nimi. Kąt ten jest mierzony w kierunku od osi i — 1 do osi /, zgodnie z regułą prawej ręki wokół prostej a#_|. Dwa współpracujące ze sobą człony mają wspólną oś połączenia ruchowego. Odsunięcie członu di jest to odległość między dwoma członami mierzona wzdłuż ich wspólnej osi. Kąt konfiguracji 0t członów połączenia ruchowego określa się wartością kąta obrotu wokół wspólnej osi, o jaki obrócono względem siebie sąsiadujące człony.
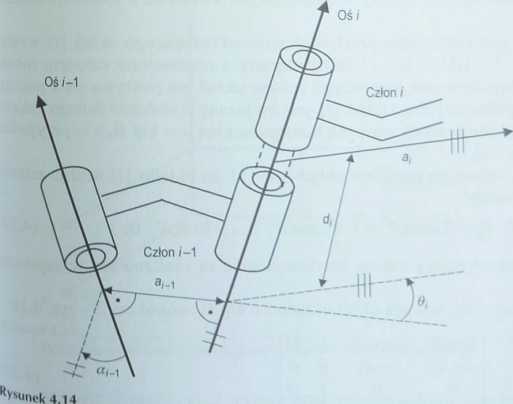
Oznaczenia parametrów stosowanych w notacji Denavita-Hartenberga
Wyszukiwarka
Podobne podstrony:
HPIM0796 4. Wprowadzenie do kinematyki robotów Wartości /, </>oraz (9 można obliczyć z
88615 P1080235 4. Wprowadzenie do kinematyki robotów Korzystając z tych oznaczeń, można określić prę
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
72842 P1080233 4. Wprowadzenie do kinematyki robotów wtedy 4. Wprowadzenie do kinematyki robotów c &
więcej podobnych podstron