skrypt'

Filtracja innowacyjna i mooelowanie s tochastyczne sygnałów
> biały szum
' MO
Rys. 4.13. Globalna realizacja ortogonalna filtru modelującego
4.3. Rotacje hiperboliczne i kołowe
Przyjmijmy, źe współczynnik Schurn p, to tangens hiperboliczny pewnego kąta Yi
Pi = tgl> H'i
(4 50)
Wówczas sekcja elementarna 0(p,j (4.20) filtru innowacyjnego przyjmuje postać
_ Tcosli Yi sinh i/r, 1 'P'' — [sinhig, coshę/,J
(4.51)
Zatem każdą sekcję filtru innowacyjnego możemy interpretować jako rotację hiperboliczną o kąt yr, wektora unormowanych sygnałów wejściowych e, | (r) i r(_i(r- I) tej sekcji Biorąc pod uwagę, że |p,| < 1, przyjmijmy, że
flpjgsinęy (4 52)
Wówczas sekcję elementarną <j(pi) (4 46) filtru modelującego możemy przedstawić jako
cos <p, a(P') sin tp,
- sin <Pi cos <p,
(4 53)
Stąd wniosek, że każdą sekcję filtru modelującego możemy interpretować jako rotację kołową o kąt tp, wektora unormowanych sygnałów wejściowych e,(t) i r,_i(r — I) tej sekcji Ponieważ operacja rotacji (obrotu) jest operacją niezmienniczą ze względu na długość przekształcanych wektorów (jest to operacja ortogonalna), stąd wniosek, że algorytm zarówno filtru innowacyjnego, jak i modelującego charakteryzuje się samorzutną stabilnością numeryczną
_—»vui.aiE i KOŁOWE
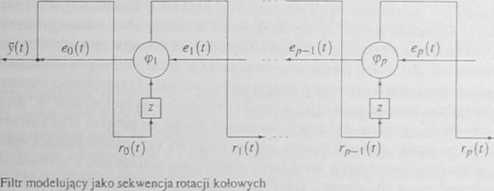
Sekcję elementarną filtru innowacyjnego, opisaną rotacją hiperboliczną (4.51), można więc schematycznie przedstawić na rys. 4.14, zaś sekcję elementarną filtru modelującego, opisaną rotacją kołową (4.53) - na rys. 4 15 Zatem stmkturę kaskadową filtru innowacyjnego z. rys. 3 10 możemy obecnie przedstawić na rys. 4 16 za pomocą sekwencji rotacji hiperbolicz.nych Podobnie, strukturę kaskadową filtru modelującego z rys 4 12 możemy zinterpretować jako sekwencję rotacji kołowych (patrz. rys. 4 17). Na zakończenie zauważmy, że zarówno rotacje hiperboliczne, jak i rotacje kołowe mają dogodną realizację sprzętową
za pomocą tzw, procesora CORDIC [50. 471 (od COordinale Rotation Digital Computer).
MO —I Vr+i e„+|(r)
rn(t~ 1)
Rys 4 |5 Rotacja kołowa
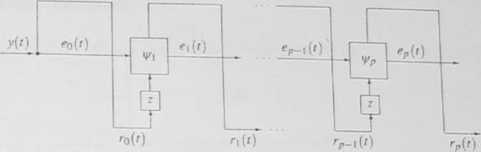
Rys 4 16 Filtr innowacyjny jako sekwencja rotacji hiperbolicznych
108
Filtracja innowacyjna i modelowanie stochastyczne sygnałów
4.4. Ortogonalna parametryzacja sygnałów drugiego rzędu
Z dotychczasowych rozważań w niniejszym rozdziale wynika. Ze znajomość współczynników Schura
(4.54)
obserwowanego sygnału y jest wystarczająca do przeprowadzenia ortogonalnej cyfrowej syntezy (modelowania stochastycznego) tego sygnału Wyznaczanie zbioru tych współczynników nazywa się zaz.wyczaj parametryzacją sygnału y.
Z poprzednich rozdziałów wynika, że istnieje kilka równoważnych metod parametryzacji sygnału, prowadzących do wyznaczenia tego samego zbioru współczynników Schura (zależnych od tego, jakimi dysponujemy informacjami odnośnie do parametryzowanego sygnału). I tak:
• Jeśli dane są obserwacje sygnału y. tj. zbiór zmiennych losowych {y(r), y(r - 1),.. .,y(t - p)}. to współczynniki Schura tego sygnału można wyznaczyć na podstawie zależności (3.3) jako
(4.55)
Współczynniki te interpretujemy wówczas jako korelacje wzajemne unormowanych błędów prognozy w przód i w tył Jeśli zamiast zmiennych losowych obserwacje sygnału stanowi nabór próbek {yo.....yr}. to wyznacza się esty
matory współczynników Schura (estymatory korelacji wzajemnych wektorów próbek błędów w przód i w tył)
109
Dla ergodycznego sygnału y mamy wówczas
(4.5
Do zagadmema tego. zw.ązanego z efektywnymi algorytmami parametryza szeregów czasowych i nastawionego na ,ch realizację w czasie rzeczywisty cyjnej'C'm> * 6' dotycz4cym cyfrowej ortogonalnej filtracji adapi
• Jeśli punkt wyjścia stanowi funkcja kowariancji {c(0),c(l),.. ,c(p sygnału y (luh jej estymator wyznaczony na podstawie naboru prób, {>’0i i yr}), to współczynniki Schura można wyznaczyć z zależności (2.30
Pi = "([4,-1 OJ,[0B,.,])c =
= -[4,-1 0jc,[0=
= -[a,_ i.o - - - u,-1,-, 00... OjCpfO i,-1.,-1... 0(-10 0... 0)' =
= ~[llei-1II0... 0 df. i,1+1...d,_ t p] x
x[0*i-i,/-l...*i_lt00...0]' =
4-1,1
- --- (4.58;
Si— I I
gdzie g,(i) = oznacza normę (2.192). Jak widać, la metoda parametryzacji jest identyczna z algebraiczną wersja algorytmu Schura. przedstawioną w punkcie 2.2.5 (patrz Przykład 7.3 w rozdziale 7).
• Jeśli jest dana widmowa gęstość mocy sygnału y (lub jej estymator), to parametryzację sygnału możemy przeprowadzić na podstawie zależności (2.276)
Pt = - (4,-, (z).zB,., (z))„ = £ W(e>e)e-IBB,-i M9) ^ (4-59)
W kolejnym podrozdziale wykorzystamy omówione dotąd wyniki, stanowiące podstawę do realizacji systemów cyfrowej transmisji sygnałów tzw. metodą liniowego kodowania prognozującego, z kompresją ilości przesyłanej informacji.
Cyfrowa transmisja sygnałów metodą liniowego kodowania prognozującego
Jako przykład wykorzystania przedstawionych w niniejszym rozdziale algorytmów ortogonalnej parametryzacji i modelowania sygnałów 2-go rzędu może służyć metoda transmisji sygnałów cyfrowych, zwana metodą tzw. liniowego
(4.56)
■^i- i.r][0 r,_ i.o ■ ■ n-i ,r-i]'
gdzie c/., oraz rij stanowią próbki sygnałów błędów prognozy w pizód i w tył, transmitowanych w strukturze filtru (patrz Przykład 7.3 w rozdziale 7).
Pi,T = l«i—1.0-
111
110
Wyszukiwarka
Podobne podstrony:
skrypt& Filtracja innowacyjna i mooelowanie stochastyczne sygnałów Modelowa mię stochastyczne sygnał
72145 skrypt$ 4.4.1.96Filtracja innowacyjna i modelowanie stochastyczne sygnałów drugiego rzędu
skrypt F 11.1 RACJA INNOWACYJNA I MODELOWANIE SIOCMASTYCZNE SYGNAŁÓW _Moojlowan,e stochastyczne syg
filtracjainnowacyjnabierzeswojanazweodtegoze Filtracja innowacyjna bierze swoja nazwę od tego, ze Wy
filtracja innowacyjna Filtracja innowacyjna bierze swoja nazwę od tego, ze Wymierz odpowiedź a. &nbs
skrypt027 (3) 52 Laboratorium Podstaw Elektrotechniki I Sygnały: u) u(t) - siu20t
więcej podobnych podstron