OMiUP t2 Gorski)4
rys. 7.33a) dla maszyn sterowych o mniejszych momentach oraz czteronumi-kowy (z dwoma parami nurników — rys. 7.33b) dla maszyn sterowych o większych momentach.
Różnice konstrukcyjne zachodzące między maszynami nurnikowymi typu jarzmowego a maszynami typu bezjarzmowego pokazano na rys. 7.34.
aj
9 2 1
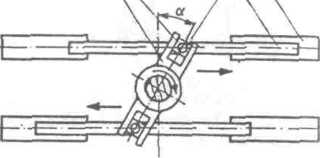
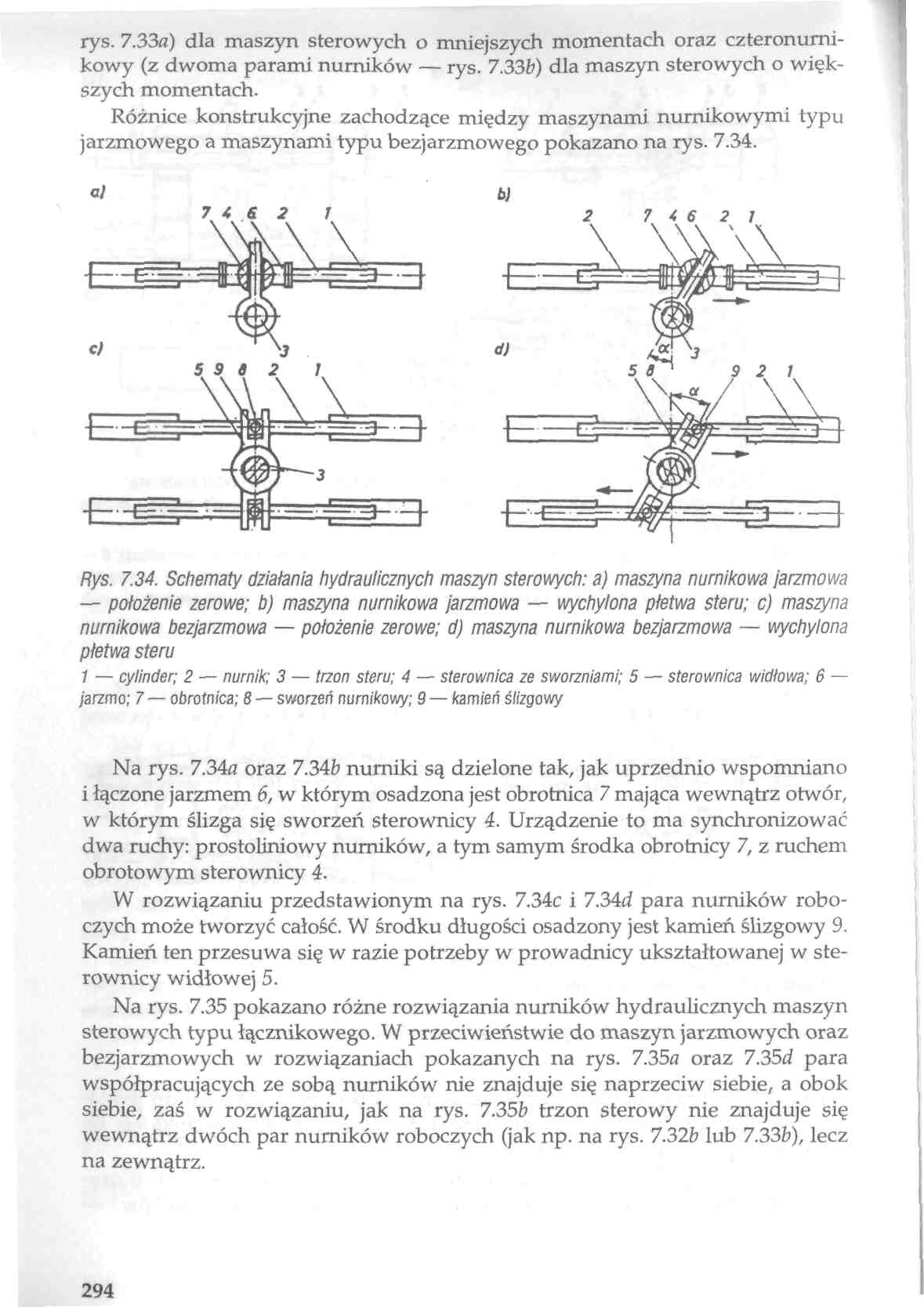
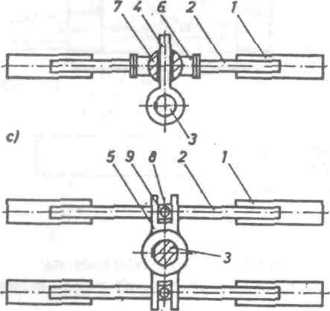
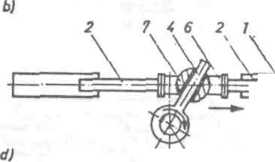
Rys. 7.34. Schematy działania hydraulicznych maszyn sterowych: a) maszyna nurnikowa jarzmowa — położenie zerowe; b) maszyna nurnikowa jarzmowa — wychylona płetwa steru; c) maszyna nurnikowa bezjarzmowa — położenie zerowe; d) maszyna nurnikowa bezjarzmowa — wychylona płetwa steru
1 — cylinder; 2 — nurnik; 3 — trzon steru; 4 — sterownica ze sworzniami; 5 — sterownica widłowa; 6 — jarzmo; 7 — obrotnica; 8 — sworzen nurnikowy; 9 — kamień ślizgowy
Na rys. 7.34n oraz 7.34b nurniki są dzielone tak, jak uprzednio wspomniano i łączone jarzmem 6, w którym osadzona jest obrotnica 7 mająca wewnątrz otwór, w którym ślizga się sworzeń sterownicy 4. Urządzenie to ma synchronizować dwa ruchy: prostoliniowy nurników, a tym samym środka obrotnicy 7, z ruchem obrotowym sterownicy 4.
W rozwiązaniu przedstawionym na rys. 7.34c i 7.34d para nurników roboczych może tworzyć całość. W środku długości osadzony jest kamień ślizgowy 9. Kamień ten przesuwa się w razie potrzeby w prowadnicy ukształtowanej w sterownicy widłowej 5.
Na rys. 7.35 pokazano różne rozwiązania nurników hydraulicznych maszyn sterowych typu łącznikowego. W przeciwieństwie do maszyn jarzmowych oraz bezjarzmowych w rozwiązaniach pokazanych na rys. 7.35a oraz 7.35d para współpracujących ze sobą nurników nie znajduje się naprzeciw siebie, a obok siebie, zaś w rozwiązaniu, jak na rys. 7.351? trzon sterowy nie znajduje się wewnątrz dwóch par nurników roboczych (jak np. na rys. 7.32b lub 7.33b), lecz na zewnątrz.
294
Wyszukiwarka
Podobne podstrony:
OMiUP t2 Gorski)9 Rys. 7.39. Zależność zmiany momentu w funkcji kąta wychylenia steru (przy p = cons
OMiUP t2 Gorski)8 Rys. 7.38. Hydrauliczne maszyny sterowe z siłownikami obrotowymi: a) z siłownikiem
OMiUP t2 Gorski07 Rys. 7.48. Schemat hydrauliczny maszyny sterowej z napędem ręcznym i siłownikiem t
58388 OMiUP t2 Gorski)3 Rys. 7.32. Rodzaje hydraulicznych nurnikowych jarzmowych maszyn sterowych ty
60696 OMiUP t2 Gorski19 Rys. 7.55. Schemat mechanicznego układu rozrządu maszyny sterowej 1 — kolumn
51714 OMiUP t2 Gorski20 Rys. 7.56. Schemat hydraulicznego układu rozrządu maszyny sterowej 1 _ cylin
więcej podobnych podstron