new 39
82 4. Rozkład sił na gwincie
Rozkład obciążeń przy podnoszeniu ciężaru Q na śrubie (przesuwaniu w górę ciężaru po równi pochyłej) przedstawia rys. 4.1c. Śruba (ciężar Q) przemieszcza się po powierzchni gwintu nakrętki (równi) pochylonej pod
kątem wzniosu gwintu y
pod działaniem siły obwodowej H
leżącej w płaszczyźnie prostopadłej do osi gwintu. Siła H na ramieniu ~ wynika bowiem z momentu jaki jest przykładany na pokrętle śruby:
MS=H-f-. (4.1)
Przemieszczeniu śruby przeciwstawia się siła tarcia
T—juN = N tgo, (4.2)
gdzie /z=tgo jest współczynnikiem tarcia między śrubą i nakrętką,
a q — kątem tarcia.
Wypadkowa siła oddziaływania nakrętki na śrubę R~ ]/ N2+T2= = N y l-f^u2 tworzy z siłą Q kąt y + g (rys. 4.Id), stąd
H=Q tg(y+e). (4.3)
Na podstawie zależności (4.1) moment skręcający jest równy
Ms=0,bdsQ tg(y+g). (4.4)
4.2. Rozkład sił przy opuszczaniu ciężaru na śrubie
z gwintem prostokątnym
Zależnie od relacji jaka zachodzi między kątem wzniosu gwintu y i kątem tarcia q rozróżnia się dwa przypadki rozkładu obciążeń.
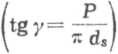
Rys. 4.2. Rozkład sił działających na śrubę z gwintem prostokątnym niesa-
mohamownym przy opuszczaniu ciężaru: a) rozkład sił na równi pochyłej, b) zamknięty wielobok sił
H
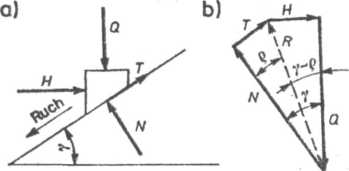
Rys. 4.3. Rozkład sił działających na śrubę z gwintem prostokątnym samo-hamownym przy opuszczaniu ciężaru: a) rozkład sił na równi pochyłej, b) zamknięty wielobok sił
Gdy y > g, rozkład sił w połączeniu przedstawia rys. 4.2. W tym przypadku dla zrównoważenia układu należy przyłożyć siłę H, gdyż siła tarcia T przeciwstawiająca się ruchowi nie wystarcza aby utrzymać zsuwający się po równi pochyłej ciężar Q. Układ taki nazywamy niesamo-hamownym. Wypadkowa siła oddziaływania nakrętki (równi) na śrubę (ciężar) R tworzy z siłą Q kąt y—g (rys. 4.2). Stąd siłę poziomą H wyznaczyć można ze wzoru
H=Q tg(r-e). (4.5)
Moment obrotowy Ms, jaki trzeba przyłożyć aby powstrzymać samorzutnie wkręcającą się śrubę jest równy:
Ms=0,5dsQ tg(y—g). (4.6)
Gdy y<g, rozkład sił w połączeniu będzie taki jak na rys. 4.3. W tym przypadku siła tarcia T jest dostatecznie duża, aby nie pozwolić na zsunięcie się ciężaru Q, a dla zsunięcia ciężaru trzeba przyłożyć dodatkowo siłę H. Układ taki nazywamy samohamownym. Z warunków równowagi (zamknięty wielobok sił na rys. 4.3), wynika:
H=Qtg(g-y). (4.7)
Jeśli przez analogię do poprzednio rozpatrywanego przypadku zmienimy zwrot wektora siły H, otrzymamy H=Q tg(y—o), czyli wzór (4.5). Wartość siły H jest wtedy oczywiście ujemna. W tym przypadku obliczony ze wzoru (4.6) moment obrotowy Ms trzeba przyłożyć, aby opuścić na śrubie ciężar Q.
4.3. Rozkład sił w połączeniu śrubowym z gwintem
o dowolnym zarysie
W gwintach, w których roboczy kąt boku gwintu ar =£ 0, rozkład obciążeń jest inny niż w gwincie o zarysie prostokątnym. W gwintach tych bowiem siła normalna N (rys. 4.4 a, b) odchyla się w płaszczyźnie n-n prostopadłej do linii śrubowej (wyznaczonej przez średnią średnicę roboczą ds) o kąt aTn. Płaszczyzna n-n tworzy z płaszczyzną 0-0 przechodzącą przez oś śruby kąt y (rys. 4.4 a). Z rysunku 4.4 c można wyznaczyć związek między roboczym kątem boku gwintu aT (w płaszczyźnie osiowej 0-0) i kątem boku gwintu arn w płaszczyźnie normalnej n-n. Ponieważ
GA
GF
stąd
DA DG
Ig arn. ~Y~tSar> GF = DE 1 = cosy
(4.8)
— cos;’.
^ _tg Urn
tg ar
Wyszukiwarka
Podobne podstrony:
54551 new 40 84 4. Rozkład sił na gwincie Rys. 4.4. Rozkład sił w złączu z gwintem o dowolnym zarysi
DSCN1591 4. Rozkład sił na gwincie 84 Rys. 4.4. Rozkład sił w złączu z gwintem o dowolnym zarysie pr
- rozkład obciążeń przy uderzeniu z boku rozkład obciążeń przy ••derze ni u z
39177 P5140249 lidzie: R — wektor główny wszystkich sił zewnętrznych Praca sił na skończonym przesun
new 41 86 4. Rozkład sił na gwinciew mmmm Jeśli szerokość powierzchni styku (S — c?0)/2 jest mała w
new 41 (2) 86 4. Rozkład sił na gwincie Jeśli szerokość powierzchni styku (S—d0)/2 jest mała w porów
więcej podobnych podstron