P1080208
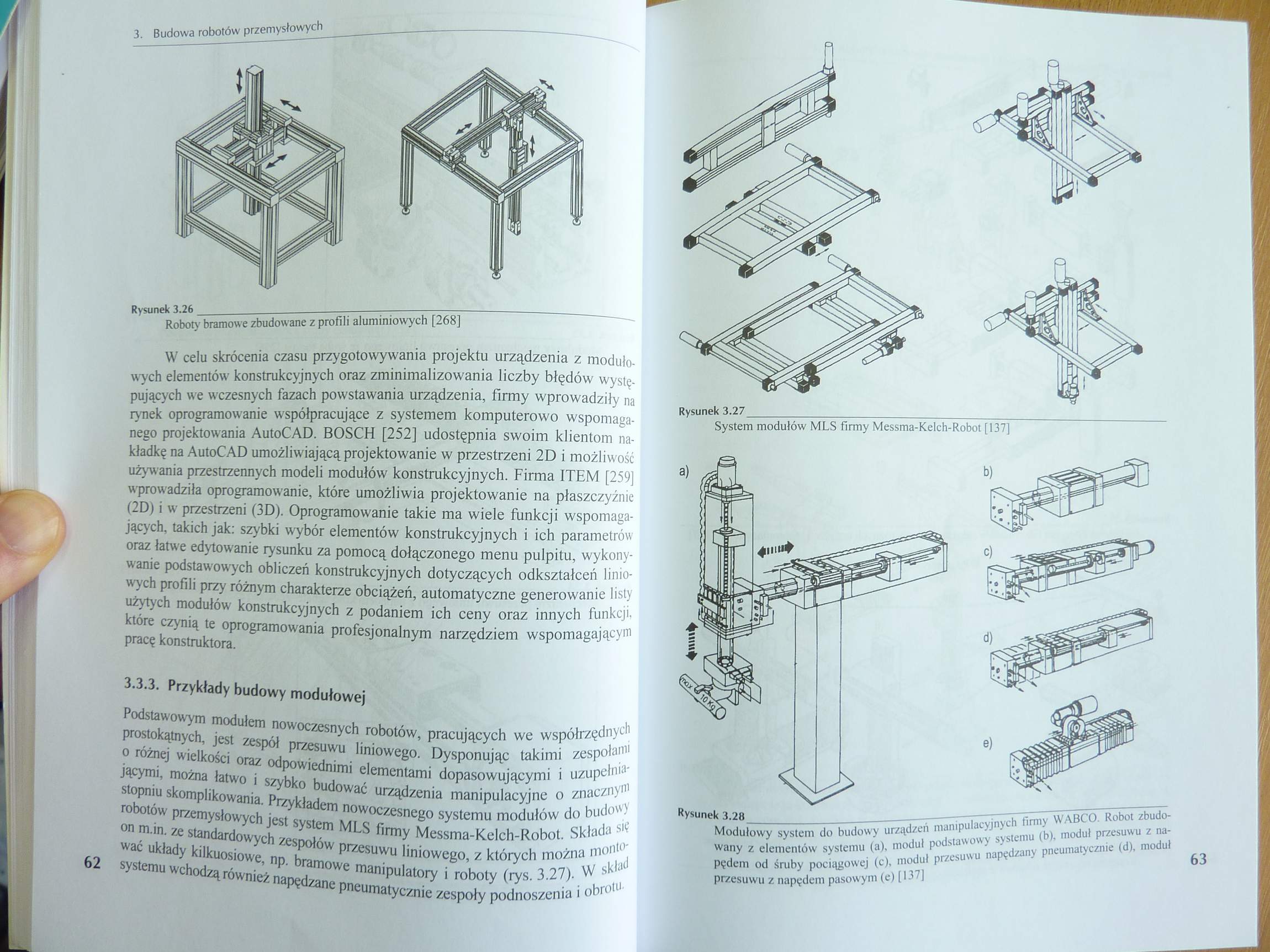
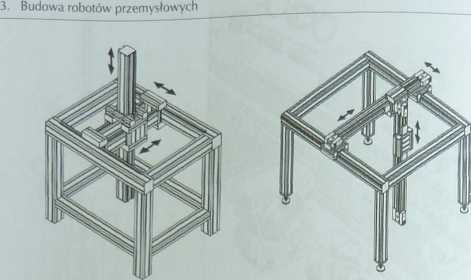
Rysunek 3.26__: .. . . _ .._
Roboty bramowe zbudowane z profili aluminiowych [268]
W celu skrócenia czasu przygotowywania projektu urządzenia z modułowych elementów konstrukcyjnych oraz zminimalizowania liczby błędów występujących we wczesnych fazach powstawania urządzenia, firmy wprowadziły na rynek oprogramowanie współpracujące z systemem komputerowo wspomaganego projektowania AutoCAD. BOSCH [252] udostępnia swoim klientom nakładkę na AutoCAD umożliwiającą projektowanie w przestrzeni 2D i możliwość używania przestrzennych modeli modułów konstrukcyjnych. Firma ITEM [259] wprowadziła oprogramowanie, które umożliwia projektowanie na płaszczyźnie (2D) i w przestrzeni (3D). Oprogramowanie takie ma wiele funkcji wspomagających, takich jak: szybki wybór elementów konstrukcyjnych i ich parametrów oraz łatwe edytowanie rysunku za pomocą dołączonego menu pulpitu, wykonywanie podstawowych obliczeń konstrukcyjnych dotyczących odkształceń liniowych profili przy różnym charakterze obciążeń, automatyczne generowanie listy użytych modułów konstrukcyjnych z podaniem ich ceny oraz innych funkcji, które czynią te oprogramowania profesjonalnym narzędziem wspomagającym pracę konstruktora.
3.3.3. Przykłady budowy modułowej
Podstawowym modułem nowoczesnych robotów, pracujących we współrzędnych prostokątnych, jest zespół przesuwu liniowego. Dysponując takimi zespołami o różnej wielkości oraz odpowiednimi elementami dopasowującymi i uzupełniającymi, można łatwo i szybko budować urządzenia manipulacyjne o znacznym stopniu skomplikowania. Przykładem nowoczesnego systemu modułów do budowy robotów przemysłowych jest system MLS firmy Messma-Kelch-Robot. Składa się on m.in. ze standardowych zespołów przesuwu liniowego, z których można montować układy kilkuosiowe, np. bramowe manipulatory i roboty (rys. 3.27). W skład systemu wchodzą również napędzane pneumatycznie zespoły podnoszenia i obrotu.
Rysunek 3.2MW-__
System modułów MLS firmy Messma-Kelch-Robot [137]
4nntt
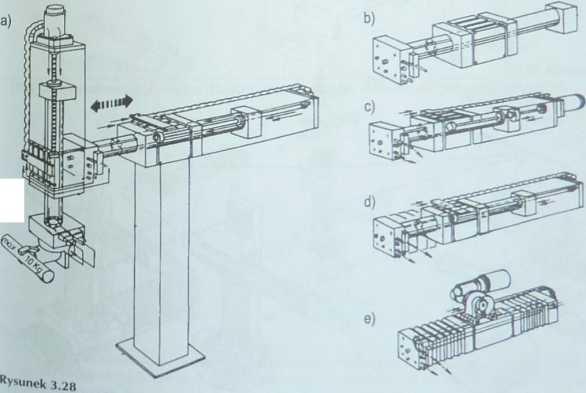
odułowy system do budowy urządzeń manipulacyjnych firmy WABCO. Robot zbudo-z elementów systemu (a), moduł podstawowy systemu (b), moduł przesuwu z na-Pv cm od śruby pociągowej (c), moduł przesuwu napędzany pneumatycznie (d), moduł Przesuwu z napędem pasowym (e) [137] 63
Wyszukiwarka
Podobne podstrony:
P1080202 Rysunek 3.13 Robot bramowy liniowy firmy Fibro z przegubowym ramieniem i jego obszar manipu
P1080207 Rysunek 129__Poczerni profili za pomocą śruby caarafaej [252] ^^caaue 22 ?CEccą śruby mo&am
P1080209 Rysunek 3J^___ Możliwości systemu Fibromanta w zakresie budowy różnych urządzeń manipulacyj
S6302585 Rys. 23.1. Rysunek ofertowy frezarki bramowej FBCa 90 1 - łoże, 2 - stojak, 3 - belka supor
IMG 05 (7) Rysunek 26 Rozkład paerśne drzew w drzewostanie w ten sposób, że dwie osoby oznaczają drz
IMGI86 (4) Rysunek 26 Macierz rangowania serwisu Klasa
slide! Roboty bramowe Roboty bramowe są charakterystyczne dla elastycznej automatyzacji jednostanowi
HPIM0896 10. Zastosowania robolów przemysłowych Roboty bramowe liniowe są stosowane głównie do za- i
Slajd12 (26) P — poziom bagienny część profilu gleby objęta bagiennym procesem glebotwórczymD - podł
рис7 Rysunek 26 Koło tendra Rysunek 28 Belka bujakowa Rysunek 27 Zestaw kołowy i maźnica 89
skanuj0001 3,1m Rysunek 3.26. Siatka hydrodynamiczna obszaru filtracji dla przypadku dopływu wody do
więcej podobnych podstron