P1080202
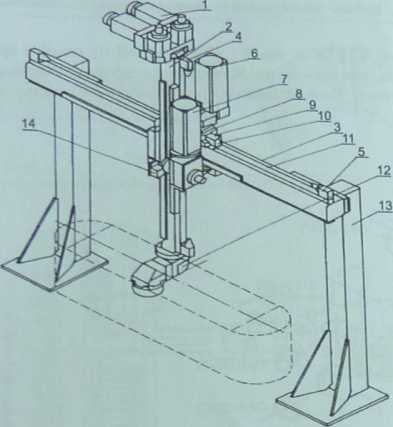
Rysunek 3.13
Robot bramowy liniowy firmy Fibro z przegubowym ramieniem i jego obszar manipulacyjny; / — układ napędu obrotu ramienia, 2, 3 — prowadnice przesuwu pionowego i poziomego, 4, 5 — zabezpieczenia krańcowe, 6, 7 — układy napędowe osi X i Z, 8 — sanie krzyżowe, 9 - prowadnice toczne, 10 — zgarniacz zanieczyszczeń, 11 - listwy prowadnicowe. 12 — obrotowe ramię przegubowe, 13 — stojak, 14 — łączniki końcowe [137]
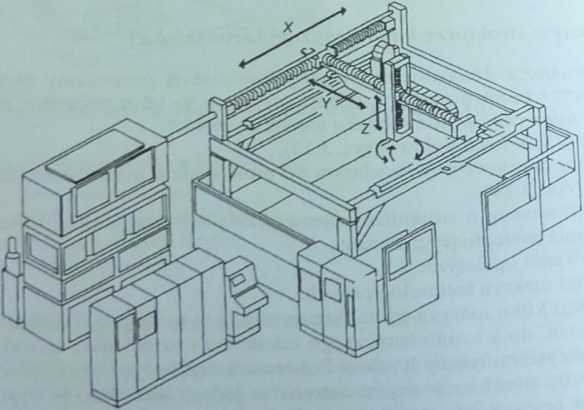
Rysunek 3.14__
Robot bramowy powierzchniowy [226]
Do obsługi całych kompleksów technologicznych, np. gniazd czy systemów obróbkowych, są stosowane roboty powierzchniowe, czasem o dużych zakresach przesuwów w poszczególnych osiach.
Współcześnie rozwój konstrukcji robotów bramowych o liniowych zespołach ruchu dotyczy przede wszystkim koncepcji budowy modułowej, co omówiono szczegółowo w następnym podrozdziale podręcznika.
3.2.7. Roboty wielokorbowe
Istotą budowy robotów - manipulatorów wielokorbowych jest zastosowanie mechanizmu z równoległowodem ukośnym. Przykład budowy dwóch pierwszych stopni swobody manipulatora pokazano na rys. 3.15.
Na rysunku 3.15b powłokę członu pierwszego usunięto, aby wyraźnie pokazać konstrukcję równoległowodu. W rozwiązaniu tym zastosowano dwa silniki bezpośredniego napędu zamontowane współosiowo w podstawie. Osie silników są usytuowane pionowo. Pierwszy człon ruchomy manipulatora jest połączony bezpośrednio z silnikiem zamontowanym na płycie podstawy. Drugi silnik jest zamocowany do tej płyty od spodu i napędza drugi człon za pośrednictwem wału i równoległowodu ukośnego umieszczonego wewnątrz członu pierwszego. Łączniki tego równoległowodu wykonują względem członu pierwszego płaskie ruchy postępowe po torach kołowych. Obudową mechanizmu (rys. 3.15a) jest lekka konstrukcja powłokowa w postaci ukośnej pustej korby o kształcie wewnętrznym opisanym powierzchnią ekwidystalną względem możliwych trajektorii łączników, dopasowaną do równoległowodów. Zapewnia ona lekkość konstrukcji przy dużej sztywności na skręcanie i zginanie, umożliwia także zastosowanie większej liczby równoległowodów ukośnych usytuowanych koncentrycznie na zewnątrz, jak i wewnątrz powłoki. Mogą one być wykorzy-
a) b)
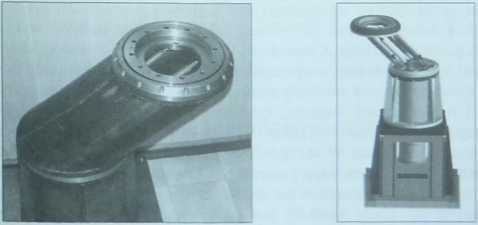
Rysunek 3.1511' _
Dwa pierwsze stopnie swobody manipulatora robota wielokorbowego: a) podstawa i pierwszy człon z równoległowodem wewnątrz, b) odsłonięta konstrukcja równoległowodu [82.83]
Wyszukiwarka
Podobne podstrony:
P1080208 Rysunek 3.26__: .. . . _ .._ Roboty bramowe zbudow
P1080393 13. Zastosowania robotów przemysłowych Rysunek 13.55 Roboty pałetyzujące firmy Famie [255]
P1080383 Rysunek 13.42____________________ Konfiguracja linii pras z robotami przegubowymi W niektór
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
52317 P1080391 13. Zastosowania robotów przemysłowych Rysunek 13*50___ Robot bramowy w zrobotyzowany
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
P1080225 4. Wprowadzenie do kinematyki robotów Rysunek 4.12__ Robot o trzech stopniach swobody w prz
więcej podobnych podstron