P1080362
13. Zastosowania robotów przemysłowych
Typowymi cechami projektowania mechatronicznego jest interdyscyplinarność, integracja, zorientowanie na rynek oraz jakość produktu dostosowana do wymagań użytkownika. Interdyscyplinarny charakter projektowania mechatronicznego wyraża się koniecznością uwzględnienia w procesie realizacji konstrukcji interdyscyplinarnej natury projektowanych wyrobów, natomiast integracja procesu projektowania umożliwia traktowanie elementów o różnej naturze fizycznej z jednakową wagą.
Filozofia projektowania urządzeń mechatronicznych
Podejście mechatroniczne do projektowania różni się znacznie od klasycznego.
W systemie konwencjonalnym zarówno projekt, jak i przestrzenne rozmieszczenie komponentów mechanicznych i elektronicznych są rozdzielone. Mechatro-niczne podejście do konstruowania charakteryzuje się tym, że system mechaniczny i elektroniczny od samego początku należy traktować jako zintegrowany przestrzennie i funkcjonalnie system całkowity (rys. 13.3). To, co łatwiej jest rozwiązać mechanicznie, rozwiązuje się środkami mechanicznymi, to zaś, co łatwiej rozwiązać elektronicznie — elektronicznymi i komputerowymi. Układ elektroniczny ma więc wpływ na kształtowanie systemu mechanicznego już podczas projektowania i odwrotnie.
Posfepowans konwenqonalne
Postępowanie mechatroniczne

Oddzielne sttadnió
Całościowy układ mechatroniczny
Różnica między konwencjonalnym a mechatronicznym podejściem do konstruowania [9]
Rysunek 133
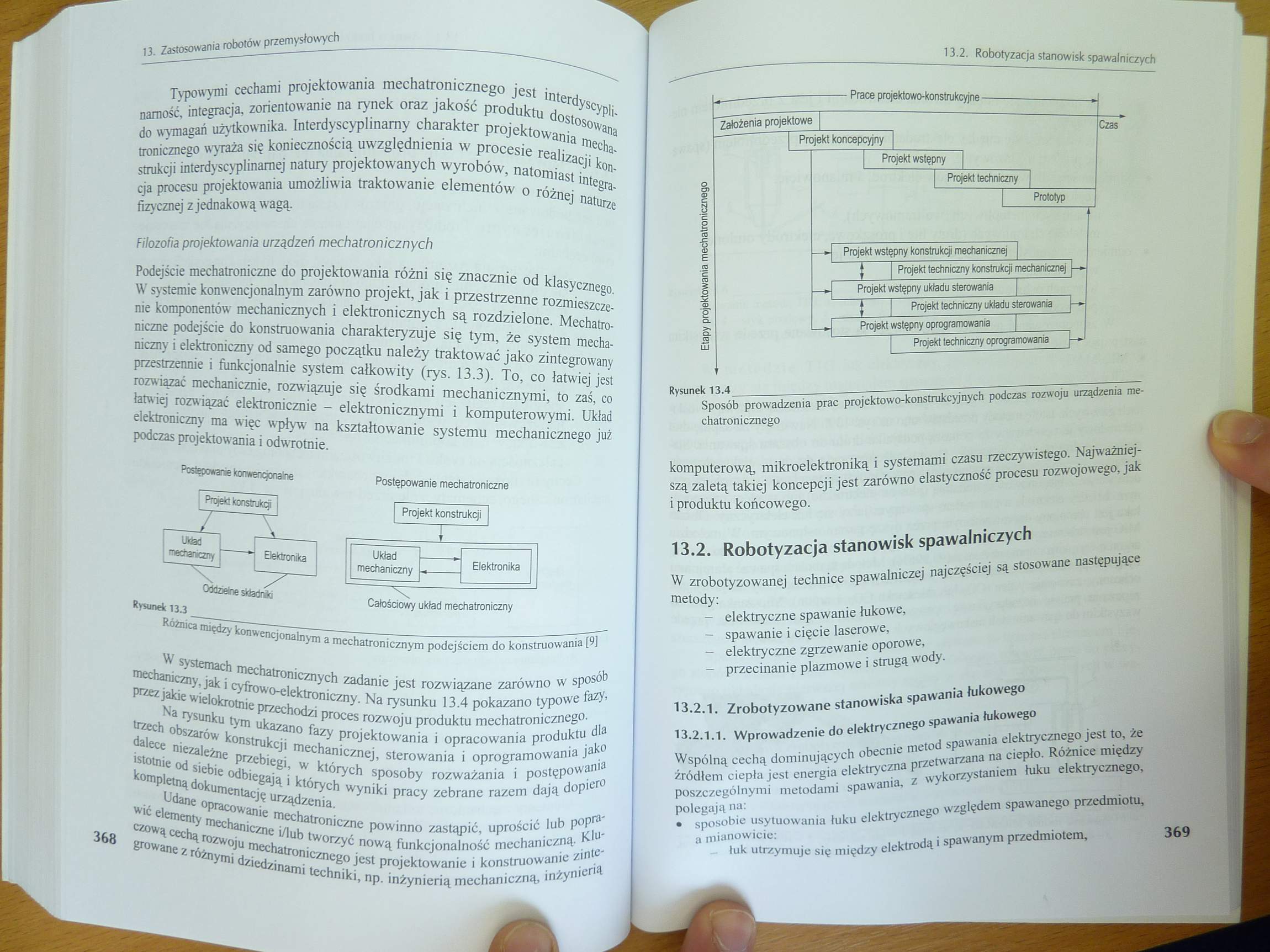
W systemach mechatronicznych zadanie jest rozwiązane zarówno w sposób mechaniczny, jak i cyfrowo-elektroniczny. Na rysunku 13.4 pokazano typowe fazy, przez jakie wielokrotnie przechodzi proces rozwoju produktu mechatronicznego.
Na rysunku tym ukazano fazy projektowania i opracowania produktu dla trzech obszarów konstrukcji mechanicznej, sterowania i oprogramowania jako dalece niezależne przebiegi, w których sposoby rozważania i postępowania istotnie od siebie odbiegają i których wyniki pracy zebrane razem dają dopiero kompletną dokumentację urządzenia.
Udane opracowanie mechatroniczne powinno zastąpić, uprościć lub poprą wić elementy mechaniczne i/lub tworzyć nową funkcjonalność mechaniczną. Klu czową cechą rozwoju mechatronicznego jest projektowanie i konstruowanie zinte 368 growane z różnymi dziedzinami techniki, np. inżynierią mechaniczną, inżynieri
Prace projektowo-konstrukcyjne -
Czas
Założenia projektowe
Projekt koncepcyjny
Projekt wstępny
Projekt techniczny
Prototyp
|
-r |
Projekt wstępny konstrukqi mechanicznej | | |
|
{ | Projekt techniczny konstrukcp mechanicznej |—► | ||
|
-r |
Projekt wstępny układu sterowania | |
|
| | Projekt techniczny układu sterowania |
h | |
|
H |
Projekt wstępny oprogramowania | |
|
Projekt techniczny oprogramowania |
H | |
Rysunek 13.4______, _
Sposób prowadzenia prac projektowo-konstrukcyjnych podczas rozwoju urządzenia mechatronicznego
komputerową, mikroelektroniką i systemami czasu rzeczywistego. Najważniejszą zaletą takiej koncepcji jest zarówno elastyczność procesu rozwojowego, jak i produktu końcowego.
13.2. Robotyzacja stanowisk spawalniczych
W zrobotyzowanej technice spawalniczej najczęściej są stosowane następujące metody:
— elektryczne spawanie łukowe,
— spawanie i cięcie laserowe,
— elektryczne zgrzewanie oporowe,
— przecinanie plazmowe i strugą wody.
13.2.1. Zrobotyzowane stanowiska spawania łukowego
13.2.1.1. Wprowadzenie do elektrycznego spawania łukowego
Wspólną cechą dominujących obecnie metod spawania elektrycznego jest to, że źródłem ciepła jest energia elektryczna przetwarzana na ciepło. Różnice między poszczególnymi metodami spawania, z wykorzystaniem łuku elektrycznego, polegają na:
• sposobie usytuowania łuku elektrycznego względem spawanego przedmiotu, a mianowicie:
‘ łuk utrzymuje się między elektrodą i spawanym przedmiotem.
Wyszukiwarka
Podobne podstrony:
P1080372 13, Zastosowania robotów przemysłowych Zakres stosowania zgrzewania oporowego jest bardzo s
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
17266 P1080390 13. Zastosowania robotów przemysłowych układy sensoryczne, jest fakt, że prace montaż
więcej podobnych podstron