P1080380
13. Zastosowania robotów przemysłowych
dzięki elastycznemu systemowi wymiany chwytaków, dopasowującemu robota do konkretnych zadań. Ideę systemu zilustrowano na rys. 13.35.
Stacje tego typu można szybko i tanio rozbudowywać o następne maszyny obróbcze, tworząc system obróbkowy. Przykładowo na rys. 13.36 pokazano stacje z dwoma i trzema centrami obróbkowymi, które można nazwać małymi elastycznymi systemami obróbkowymi. Dostawienie jednej czy dwóch dodatkowych maszyn nie stanowi żadnego problemu technicznego, a koszty zwiększają się tylko o koszt samej maszyny. Można sądzić, że rozwiązanie to będzie w przyszłości coraz częściej stosowane.
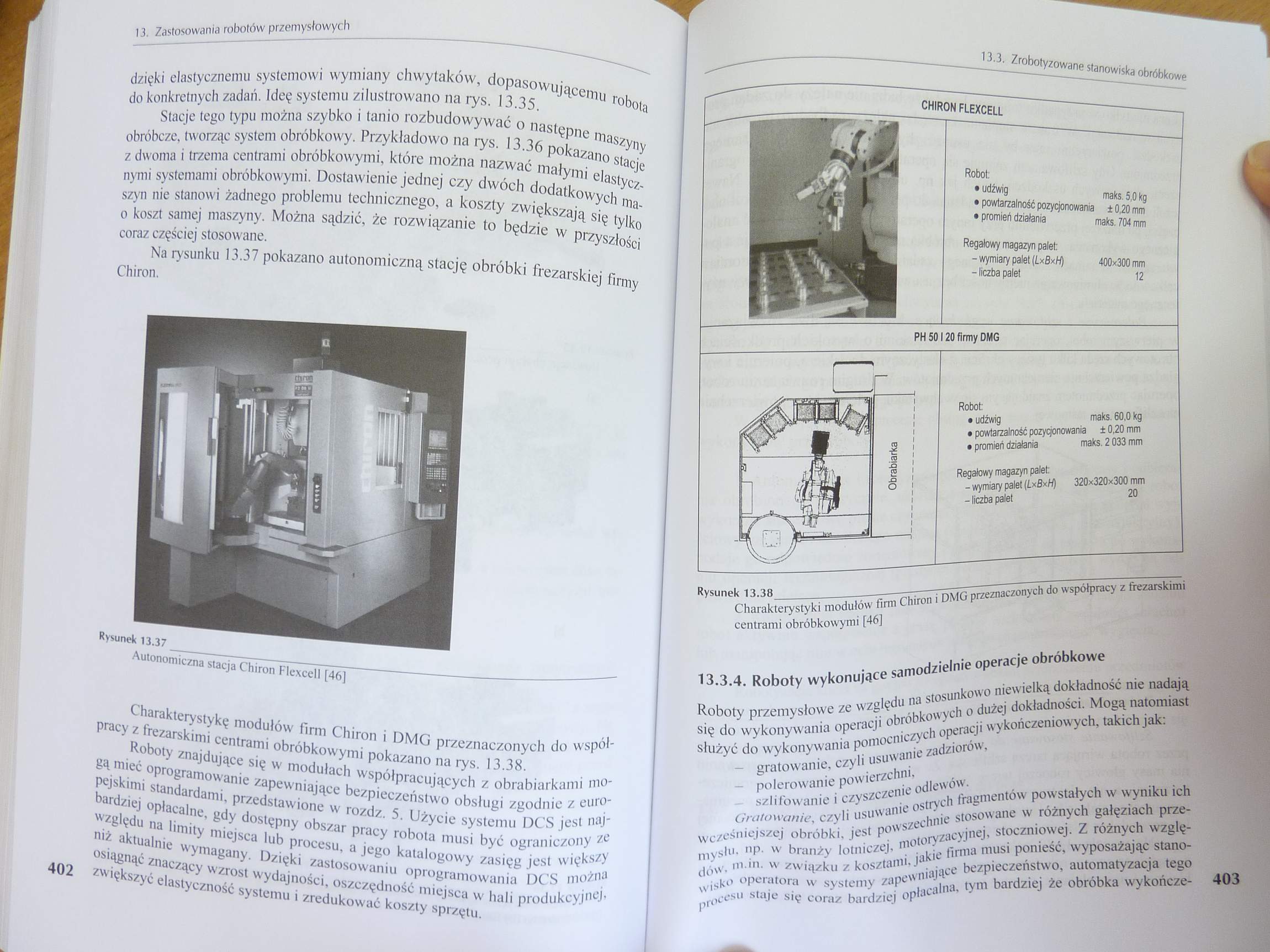
Na rysunku 13.37 pokazano autonomiczną stację obróbki frezarskiej firmy Chiron.
Rysunek 13.37 ________
Autonomiczna stacja Chiron Flexcell [46]
Charakterystykę modułów firm Chiron i DMG przeznaczonych do współpracy z frezarskimi centrami obróbkowymi pokazano na rys. 13.38.
Roboty znajdujące się w modułach współpracujących z obrabiarkami mogą mieć oprogramowanie zapewniające bezpieczeństwo obsługi zgodnie z europejskimi standardami, przedstawione w rozdz. 5. Użycie systemu DCS jest najbardziej opłacalne, gdy dostępny obszar pracy robota musi być ograniczony ze względu na limity miejsca lub procesu, a jego katalogowy zasięg jest większy niż aktualnie wymagany. Dzięki zastosowaniu oprogramowania DCS można osiągnąć znaczący wzrost wydajności, oszczędność miejsca w hali produkcyjnej, 402 zwiększyć elastyczność systemu i zredukować koszty sprzętu.
13.3. Zrobotyzowane stanowiska obróbkowe
Robot

CHIRON FLEXCELL

• udźwig maks. 5,0 kg
• powtarzalność pozycjonowania ± 0,20 mm
• promień działania maks. 704 mm
Regałowy magazyn palet
- wymiary palet (LxBxH) 400x300 mm
- liczba palet 12
PH 50120 firmy DMG
Robot
• udźwig maks. 60,0 kg
• powtarzalność pozycjonowania ± 0,20 mm
• promień działania maks. 2 033 mm
Regałowy magazyn palet
- wymiary palet [LxBxH) 320x320x300 mm
- liczba palet |jj|
Rysunek 13.38_____ ______._
Charakterystyki modułów firm Chiron i DMG przeznaczonych do współpracy z frezarskimi centrami obróbkowymi [46]
13.3.4. Roboty wykonujące samodzielnie operacje obróbkowe
Roboty przemysłowe ze względu na stosunkowo niewielką dokładność nie nadają się do wykonywania operacji obróbkowych o dużej dokładności. Mogą natomiast służyć do wykonywania pomocniczych operacji wykończeniowych, takich jak:
- gratowanie, czyli usuwanie zadziorów,
- polerowanie powierzchni,
- szlifowanie i czyszczenie odlewów.
Gratowanie, czyli usuwanie ostrych fragmentów powstałych w wyniku ich Wcześniejszej obróbki, jest powszechnie stosowane w różnych gałęziach przemysłu, np. w branży lotniczej, motoryzacyjnej, stoczniowej. Z różnych względów. m m. w związku z kosztami, jakie firma musi ponieść, wyposażając stano-W syst,cm3I 7apewniaj?ce bezpieczeństwo, automatyzacja tego proc je się coraz bardziej opłacalna, tym bardziej że obróbka wykończe-
403
Wyszukiwarka
Podobne podstrony:
52317 P1080391 13. Zastosowania robotów przemysłowych Rysunek 13*50___ Robot bramowy w zrobotyzowany
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
17266 P1080390 13. Zastosowania robotów przemysłowych układy sensoryczne, jest fakt, że prace montaż
więcej podobnych podstron