p9 (6)
2. Modele matematyczne układów regulacji
F(t) = m,Dx. + B.x. +-x. +-(jć,-.v,)+-
w , , . C'D ^ C^D\ ^ Cp D
0 = m21)x2 + —-(r2 - at, ) + —!— (x2 - x3)
(*i -*3)
Cp2D
CpiD
0 =
m3D + B 2 + —
'2 cp5d
*3+77“ fa “ *2 )'+ — fo “ *1)
C
/>3
'P4
Powyższe równanie można również zapisać w postaci: w,*, + + *2(x, -*2)+ A:4(*, -x3)+k]X] = F
m2'x2 +*3(x2 - jc3 )+ *2 (.r2 - xx) = 0
/Mjićj + Bp2xy + k4 (x3 - jc,) + k~ (x3 - x2)+ k5x3 = 0
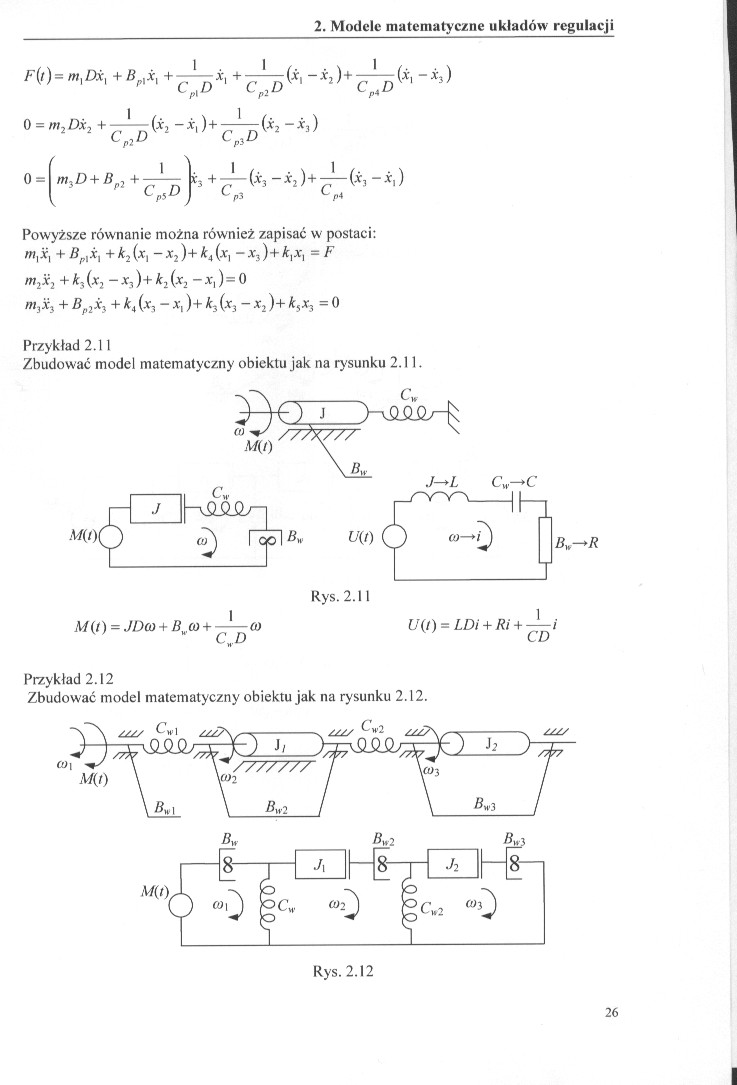
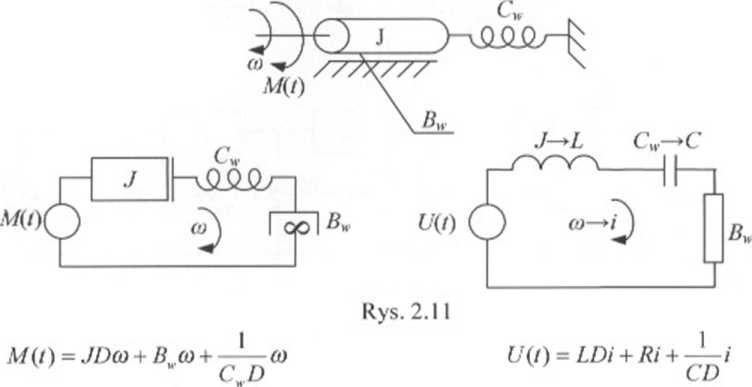
Przykład 2.11
Zbudować model matematyczny obiektu jak na rysunku 2.11.
Przykład 2.12
Zbudować model matematyczny obiektu jak na rysunku 2.12.

1
Wyszukiwarka
Podobne podstrony:
s10 (23) 2. Modele matematyczne układów regulacji C.,D J, D + Bw2 + I C„D +co,=M(r)Cu,z) C^D(0,- C^D
s11 (24) 2. Modele matematyczne układów regulacji Przykład 2.14 Zbudować model matematyczny obiektu
p4 (13) 2. Modele matematyczne układów regulacji2.2. Metoda prądów Oczkowych (II prawo Kirchoffa) Dr
68279 p6 (7) 2. Modele matematyczne układów regulacji I = G(D)= D 1 gdzie T = JZ
57484 p5 (7) 2. Modele matematyczne układów regulacji Przykład 2.5 Zbudować model matematyczny i wyz
69275 p1 (20) 2. Modele matematyczne układów regulacji2. MODELE MATEMATYCZNE UKŁADÓW REGULACJI Rys.
więcej podobnych podstron