skanuj0023 (125)

Stwierdzono, że wyznacznik z macierzy przy niewiadomych jest różny od zera, wobec tego analizowany układ jest geometrycznie niezmienny (przy detA =0 układ geometrycznie zmienny).
Ponieważ zachowane jest kryterium ilościowe 2w = p+r (e = 31) to schemat jest statycznie wyznaczalny (5 W).
Dla analizowanego układu równań istnieje macierz odwrotna A~l, istnieje zatem jednoznaczne rozwiązanie tego układu.
Pierwiastki równań wynoszą:
2n R2
R-2x ~ R-2y “1" j ~~'
&3x — ~~ 3
v* = \p1+\p»
t>2 = Pl+\P»
Kontrola poprawności rozwiązania.
EY = 0 V1 + VA+R2y+R2y—Pi = 0,
+ 2~lr3^2~3*>2~^1 =
Znajomość siły D2 (oraz reakcji) pozwala wyznaczyć siłę w pręcie Sj metodą przecięć.
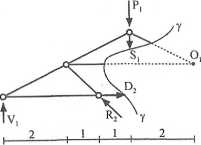
Suma momentów względem 0lf (dla przekroju y—y) daje relację ZM01 = 0, -S1*2-P1-2~D2-l + F1+ó+R2y*4 = 0,
fc = -p^(p^p*)+3(ip‘4p>)+2ip* n
= -Pi-lPiĄPi+lPi+PiĄPi- +2 Pr
Md,
Z analizy (tych tylko otrzymanych) wyników wnioskujemy, że przy obciążeniu tylko siłą pionową Plt reakcje R2 = R2 = 0, a. siły występują tylko w prętach pasa górnego i dolnego. W przypadku obciążenia wyłącznie siłą poziomą P2, występują siły we wszystkich prętach kratownicy.
Zademonstrowane podejście prowadzi wprawdzie do celu, ale jest uciążliwo (najlepsza metoda to metoda efektowna i efektywna). Zadanie to można rozwiązać stosując metodę wymiany prętów Henneberga, która pozwoli także określić geometryczną niezmienność układu.
Przekształćmy schemat kratownicy w łatwy do rozwiązania i na pewno geometrycznie niezmienny.
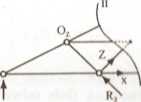
Przecinamy pręt D2 (przyjmując w jego kierunku siłę X) i wstawiamy go w miejsce Z, otrzymując schemat o charakterze trójprzegubu.

2
2
2
02
• Oddziaływania:
ZM02 = 0, Pi* %+R2y'2+Pl -4-P2 -4 = 0.
Przekrój I-I
ZM12(0 = O, Pi • 2+U2y • 2+Pj • 2-3T • 3-0, stąd 6V1—6Pl—4P2+3X = 0, V, = P1+łp2-lX,
6R2,+12P,+4P2-12X = 0, P2,= -2P1-|p2+2^.
v,t
II
i *2 ■■■■ i 2 =—|
-i
• Siła w pręcie Z kratownicy. Przekrój II—U
£M0ł = 0,
Wyszukiwarka
Podobne podstrony:
skanuj0009 można stwierdzić, że wpływ temperatury na współczynnik podziału nie jest znaczący, jeżeli
skanuj0016 (54) -3- 9.2 Stwierdzenie, że trójkąt ABC jest równoboczny, oznaczenie długości jego b
73916 Str069 134 4. KIuck publiczne (słowo ..niezależne” oznacza tu, że wyznacznik
62768 skanuj0022 (111) 275 iraisarki wyznacza się przy irm posuwu jest możliwy do wyzmczai wrzeciona
240(1) stwierdzamy, że wyznaczona pochodna jest funkcją tylko stosunku zmień-y nych —, czyli krótko,
skan0046 (2) 3. Termodynamika chemiczna I zasada termodynamiki stwierdza, że energia wewnętrzna U uk
elektryczną można się pokusić o stwierdzenie, że miarą rozwoju cywilizacyjnego społeczeństwa jest je
77335 P2280013 A Wnioski ^jr Na podstawie przeprowadzonych badań można stwierdzić, że Poliamid PA 6,
59194 skanuj0130 można zrozumieć, że jeśli coś tracę, to znaczy, żc lepiej mi bez tego. Wracam do do
więcej podobnych podstron