Skrypt PKM 1 00135
270
Rozwiązanie
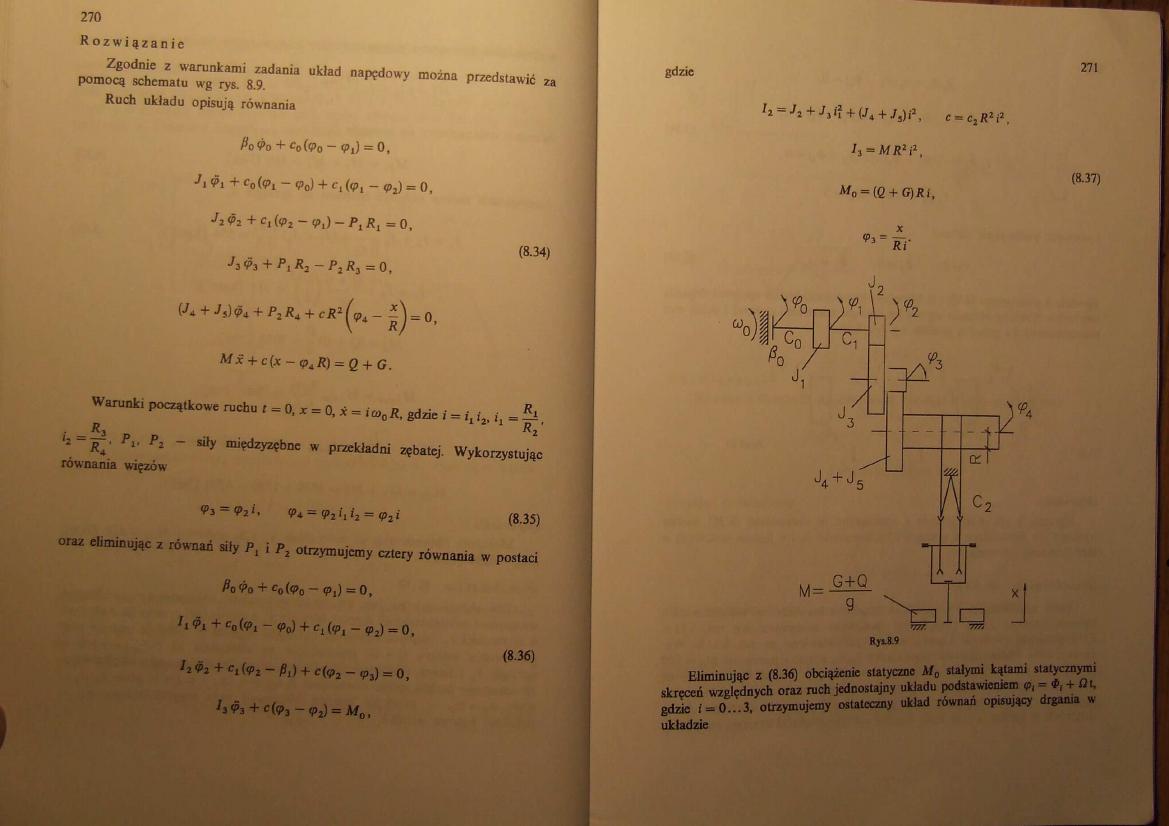
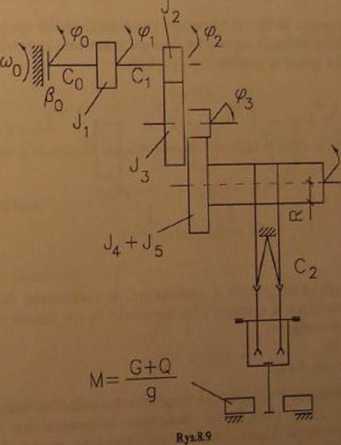
Zgodnie z warunkami zadania układ napędowy można przedstawić za pomocą schematu wg rys. 8.9.
Ruch układu opisują równania
/Wo + £o(<Po- 9i) = 0.
Pi + Co(<Pi “ ę>o) + c, (<?! - Oa) = 0.
J2 ę2 + ct (<p2 — <pt) — PtRx = 0,
(8.34)
J3<p2 + P,R2 -p2r3 =0.
{Ja + Js)9* + P2R4 + c*2(<P* - ^ = °.
Mx + c(x - p4R) = Q + G.
Warunki początkowe ruchu r = 0, x = 0, x = io)0R, gdzie i = i\i2. ix = —^.
fl
*2= TT P2. P, — siły międzyzębne w przekładni zębatej. Wykorzystując równania więzów
<P3 = ę>2i, <P4 = g>2li <2as9>j* (8-35)
oraz eliminując z równań siły Pt i P2 otrzymujemy cztery równania w postaci /ło^o + ^otoo- <Pl)=°»
;ićł + c0(<?>1 -<P0) + ci(Vi — «P2) = 0.
(836)
*2 $2 + CjOpj - 0,) -1- e(ę>2 ~ <Pi) = 0,
+ c(ę»3 - (p2) = M0
<Pj =
Ri'
<?z
(8.37)
gdzie
ly-MR*Pt M0 = {Q + G)Rl,
x
’J
Eliminując z (8.36)
Mli r6w“4 opwwy dIgan11"
układzie
Wyszukiwarka
Podobne podstrony:
29843 Skrypt PKM 1 00035 70 Siłę określimy z warunku równowagi Równanie powyższe można przedstawić w
arkusz bII + odpowiedzi0002 Zadanie 5. (4 pkt.) Przeprowadzono doświadczenie przedstawione za pomocą
Skrypt PKM 1 00006 12 Rozwiązanie całego zadania jest jednak nieoznaczone, gdyż oprócz równaó (1.2),
Skrypt PKM 1 00067 134 Rozwiązanie Gdy sworzcń pasowany jest ciasno, liczymy średnicę d /. warunkiem
86466 Skrypt PKM 1 00006 12 Rozwiązanie całego zadania jest jednak nieoznaczone, gdyż oprócz równaó
Skrypt PKM 1 00012 24 Rozwiązanie Sprawdzamy możliwość zamienności całkowitej Ta + Tb + 2Tc + Td+Te
Skrypt PKM 1 00138 276 Rozwiązanie Równania dynamiki Ji Pi + c(ę>j - <p2) + B{(pi - (pi) = 0,
16164 Skrypt PKM 1 00032 64 Rozwiązanie Maksymalna wartość momentu zginającego w przekroju B-B wynos
więcej podobnych podstron