SS854627
2
4. CEL ĆWICZENIA I ZAKRES BADAŃ
Dyskretny układ drgający o dwóch stopniach swobody jest najprostszym modelem, na którym można wykonać badania eksperymentalne oraz zaobserwować i z pewnym, nieuniknionym błędem wyznaczyć specyficzne własnośći układu i jego ruchu drgającego, o podstawowym znaczeniu w procesie projektowania nowych obiektów technicznych oraz modyfikacji konstrukcji obiektów już istniejących.
Podstawowym celem ćwiczenia jest doświadczalne potwierdzenie modeli i rozważań teoretycznych przedstawionych w kolejnym podrozdziale i pełniejsze zrozumienie zjawisk towarzyszących drganiom mechanicznym — wibracjom, które w znacznym zakresie można uogólnić dla drgań układów ciągłych.
Zakres badań obejmuje wyznaczenie postaci (modów) drgań, obliczenie naturalnych częstości drgań oraz porównanie ich wartości z wyznaczonymi w eksperymencie. Należy porównać postacie drgań wzbudzonych warunkami początkowymi odpowiadającymi obliczonym wektorom własnym układu
z postaciami drgań wzbudzonymi warunkami początkowymi różniącymi się od opisanych wektorami własnymi.
4.1. Wstęp teoretyczny
Równania drgań dyskretnych układów mechanicznych można wyznaczyć stosując zasadę
d’Alemberta. W przypadku układów o wielu stopniach swobody korzystniejsze jest posługiwanie się
równaniem Lagrange’a II rodzaju. Jeśli równania ruchu wyznaczane są dla współrzędnych odmierzanych w układzie bezwzględnym, z czym mamy w praktyce najczęściej do czynienia, najwygodniej jest przyjąć zapis macierzowy, w którym macierze tworzone są bezpośrednio na podstawie schematu układu drgającego. Do wniosków takich można dojść śledząc analizę przeprowadzoną dla modelu układu o dwóch stopniach swobody.
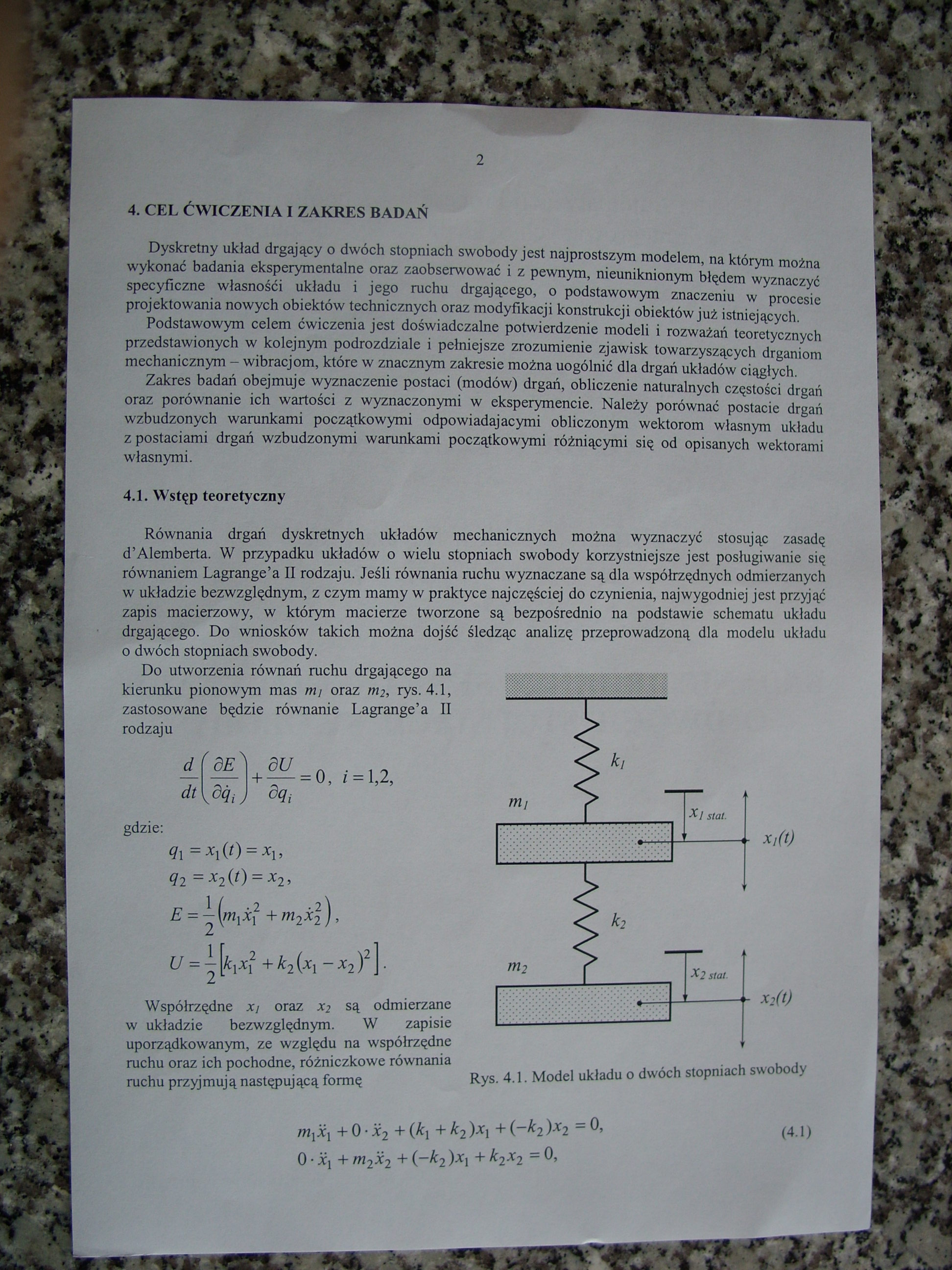
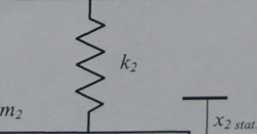
Do utworzenia równań ruchu drgającego na kierunku pionowym mas mj oraz m2, rys. 4.1, zastosowane będzie równanie Lagrange’a II rodzaju
dtydąi) dqf
mi
gdzie:
i =xl(t) = xl, q2 =x2{t) = x2,
Współrzędne xj oraz X2 są odmierzane w układzie bezwzględnym. W zapisie uporządkowanym, ze względu na współrzędne ruchu oraz ich pochodne, różniczkowe równania ruchu przyjmują następującą formę

ki
stal.
Xi(t)
- X2(t)
Rys. 4.1. Model układu o dwóch stopniach swobody
(4.1)
Wyszukiwarka
Podobne podstrony:
zawierające: cel ćwiczenia, zakres ćwiczenia, wykaz poleceń i schematy układów pomiarowych, tabele
Badanie transformatora jednofazowego1. Cel ćwiczenia Celem badań jest zapoznanie s
Cel ćwiczenia i zakres ćwiczenia Celem ćwiczenia jest pomiar zmian temperatury i gęstości strumienia
2.4. Opracować i uzgodnić z prowadzącym ćwiczenia zakres badań 2.5.
Untitled 41 Outport Rys. 31. Model osc układu drgającego o jednym stopniu swobody
Strona0110 5. DRGANIA LINIOWE UKŁADÓW O SKOŃCZONEJ LICZBIE STOPNI SWOBODY Układ o skończonej liczbie
3 1. Cel ćwiczenia Celem ćwiczenia jest poznanie zakresu obowiązujących badań technicznych dla silni
CCF20130221�047 ĆWICZENIE IIBadania połowę i pobieranie próbek gruntów1. CEL I ZAK
skrypt163 168 3. PROGRAM ĆWICZENIA 3.1. ZADANIA DO WYKONANIA Zakres badań obejmuje obserwację zjawis
II CEL I ZAKRES BADAN Badania w ramach tematu pt.: „Organizacyjno-funkcjonalne formy i wyniki działa
Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawami wybranych metod badań struktury i
72756 P1090412 Ćwiczenie 8 KUCIE W MATRYCY OTWARTEJ 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie
skanowanie0004 (12) 6. Zakres sprawozdania 1. Cel ćwiczenia. 2.
więcej podobnych podstron