Str012 (7)
12
Tabl. 2.1. Orientacyjne wartości współczynników sprawności 77, wg [5, 10, 15,42,49,52]
Tabl. 2.2. Orientacyjne wartości przełożeń u
przekładni jednostopniowych, wg [15, 49, 50]
|
Rodzaj przekładni |
Zamknięta |
Otwarta |
|
Walcowa przekładnia zębata |
0,95...0,98 |
0,92...0,94 |
|
Stożkowa przekładnia zębata |
0,94...0,97 |
0,91...0,93 |
|
Przekładnia planetarna 1-st |
0,90...0,95 | |
|
2-st |
0,85...0,90 |
- |
|
Przekładnia ślimakowa dla | ||
|
liczby zwojów ślimaka z, | ||
|
-niesamohamowna z,= 1 |
0,68...0,72 |
0,52...0,62 |
|
z,= 2 |
0,73...0,78 |
0,60...0,70 |
|
*i=4 |
0,78...0,85 | |
|
- samohamowna zx— 1 |
0,45 |
0,40 |
|
Przekładnia łańcuchowa |
0,94...0,96 |
0,90...0,93 |
|
Przekładnia cierna |
0,88...0,94 |
0.70...0.85 |
|
Przekładnia pasowa | ||
|
- o pasie klinowym |
0,93. |
.0,95 |
|
- o pasie płaskim |
0,94. |
.,96 |
|
Łożyska toczne (jedna para) |
0,990...0.995 | |
|
Łożyska ślizgowe (jedna para) | ||
|
- o tarciu płynnym |
0,990. |
.0,995 |
|
- o tarciu mieszanym |
0,975. |
.0,985 |
|
Sprzęgła |
0,97. |
.0,98 |
Wartości współczynników sprawności przekładni są przedstawione bez uwzględnienia sprawności łożysk.
|
Rodzaj przekładni |
Przełożenie | |
|
zalecane (min...max) |
graniczne | |
|
Przekładnia zamknięta - walcowa • | ||
|
- szybkobieżna |
3,1...5,0 |
8 |
|
- wolnobieżna |
2,5...4,0 |
6,3 |
|
- o zębach daszkowych |
3,0...5,0 |
8 |
|
- stożkowa • | ||
|
- o zębach prostych |
2,0...3,0 |
5 |
|
- o zębach skośnych |
4,0...6,0 |
7 |
|
- obiegowa |
6,3...12,5 |
_ |
|
Przekładnia otwarta | ||
|
- walcowa |
4,0...7,0 |
12 |
|
- stożkowa |
3,0...5,0 |
7 |
|
Ślimakowa dla liczby | ||
|
zwojów ślimaka * zx - 1 |
28...50 |
80 |
|
*1 = 2 |
14...40 |
60 |
|
*1 = 4 |
8.0...30 |
40 |
|
Przekładnia pasowa | ||
|
- o pasie klinowym |
2,0...5,0 |
7 |
|
- o pasie płaskim |
2,0...4,0 |
6 |
|
Przekładnia łańcuchowa |
2,0...5,0 |
7 |
• Znormalizowane wartości przełożenia wg PN (tabl. 5.3.5). Uwaga! Ze znormalizowanych wartości przełożeń przekładni zębatych korzysta się w przypadkach projektowania reduktorów przy ich masowej produkcji.
Tabl. 2.3. Zalecenia dotyczące podziału przełożenia reduktorów i napędów, wg [5, 10, 15, 51]
|
Jednostopniowe reduktory i przekładnie |
(tabl. 2.2) |
|
Walcowe reduktory 2-stopniowe |
uQ= 7,0...45 (uomax$ 55) (u,>u2; u,=(i,2...1,25)/iro;iłwKfe) |
|
3-stopniowe |
Uo= 30...200 (uoauxś300) (Ul>U2>U3; i/Zm 1 < Tj/bd 2 < Tfrbd 3) |
|
wielostopniowe |
Uo=U,U2 u3 ■- (u1>u2>u3 fbd\<^u2<i/bdr■••) |
|
Stożkowo-walcowe reduktory 2- stopniowe 3- stopniowe |
uQ = 6,3...31,5 (t/pst<UpW; upst~0,9{uo) uo-20...160 {UpSi<UpW\, Upw\ > Wpw2) |
|
Ślimakowe reduktory 1 -stopniowe 2-stopniowe |
u„ = 8,0...80 u0 = 100...4000 |
|
Napęd z wykorzystaniem pasowej przekładni oraz walcowego reduktora (rys. 2.1) |
Upp ~ 0,8 u pW |
——
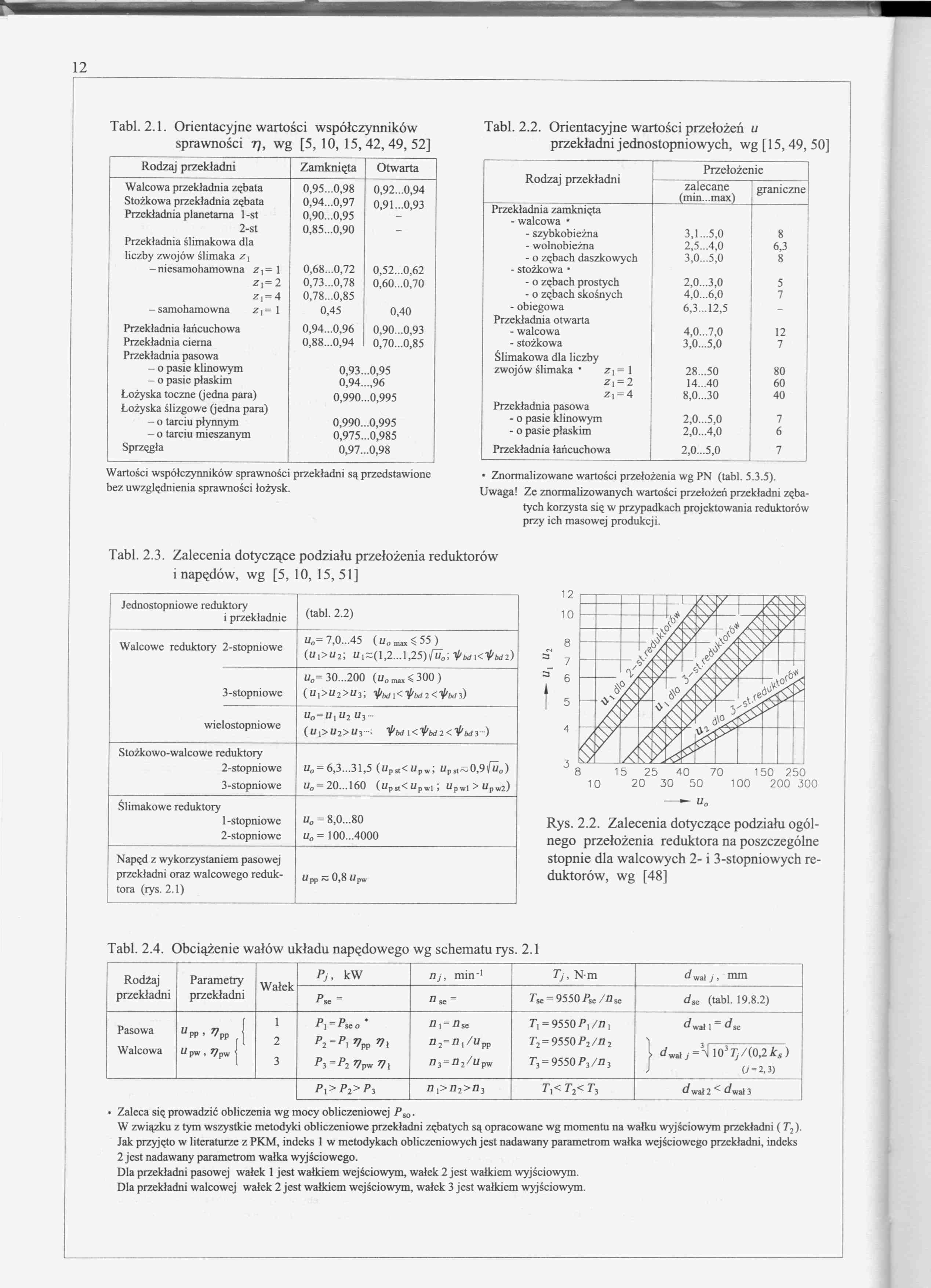
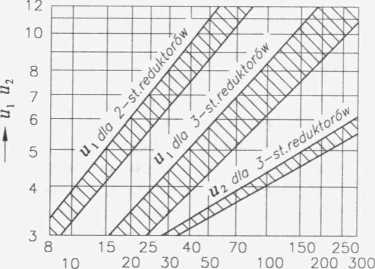
Rys. 2.2. Zalecenia dotyczące podziału ogólnego przełożenia reduktora na poszczególne stopnie dla walcowych 2- i 3-stopniowych reduktorów, wg [48]
Tabl. 2.4. Obciążenie wałów układu napędowego wg schematu rys. 2.1
|
Rodzaj przekładni |
Parametry przekładni |
Wałek |
Pj, kW |
rij, min1 |
Tj, N m |
d waj j, mm |
|
P SC = |
A se — |
7'se = 9550Psc/nse |
dx (tabl. 19.8.2) | |||
|
Pasowa Walcowa |
upp> Vw j u pw , 7pw | |
1 2 3 |
Pt=Psco’ P2=P> Vx pi=Pi 7Pw V\ |
O 1 = U se n2~ /u pp n3=n 2^ u p^ |
T^ = 955QPWn\ T2 = 9550 P2/n2 T3 = 9550 P2/n3 |
^wał 1 — ^se 1 103 Tj/{0,2 ks) J (7-2,3) |
|
Px>P2>Pi |
n1>n2>n3 |
T,< T2< T2 |
d wał 2 ^ dwał 3 | |||
< Zaleca się prowadzić obliczenia wg mocy obliczeniowej Ps0.
W związku z tym wszystkie metodyki obliczeniowe przekładni zębatych są opracowane wg momentu na wałku wyjściowym przekładni (T2). Jak przyjęto w literaturze z PKM, indeks 1 w metodykach obliczeniowych jest nadawany parametrom wałka wejściowego przekładni, indeks 2 jest nadawany parametrom wałka wyjściowego.
Dla przekładni pasowej wałek 1 jest wałkiem wejściowym, wałek 2 jest wałkiem wyjściowym.
Dla przekładni walcowej wałek 2 jest wałkiem wejściowym, wałek 3 jest wałkiem wyjściowym.
Wyszukiwarka
Podobne podstrony:
Str012 (7) 12 Tabl. 2.1. Orientacyjne wartości współczynników sprawności 77, wg [5, 10, 15,42,49,52]
IMG00012 12 Tabl. 2.1. Orientacyjne wartości współczynników sprawności 77, wg [5,10,15,42,49,52] Tab
010 2 Tabl. 1.1.1. Orientacyjne wartości współczynników sprawności 77 [16] Rodzaj
010 3 Tabl. 1.1.1. Orientacyjne wartości współczynników sprawności r; [16] Rodzaj
010 3 Tabl. 1.1.1. Orientacyjne wartości współczynników sprawności 7j [16] Rodzaj
kurmaz010 Tabl. 1.1.1. Orientacyjne wartości współczynników sprawności r [16] Rodzaj przekładni
kurmaz010 Tabl. 1.1.1. Orientacyjne wartości współczynników sprawności 7] [16] 1 Rodzaj przekładni
Tabl. 1,1.1. Orientacyjne wartości wspWczynników sprawności (77) [u] Rodzaj
CCI20101229�016 f Tabela _3, f Orientacyjne wartości współczynnika sprawności tj ! Wydłużenie rzec
skanuj0005 (4) Orientacyjne wartości współczynnika intensywności chłodzenia H dla różnych ośrodków
30 (555) Prędkość wiatru, m/» Tabl. 2.4. Wartości współczynnika kierunkowego c0;i. wg PN-fS11993-1-4
Zdjecie!5 T**t3 Orientacyjne wartości współczynników przenikania ciepła *k" dla wymienników
169 O pewnych aspektach doboru Przyjmujęc stałę wartość współczynnika sprawności urzędzeń
więcej podobnych podstron