Untitled Scanned 23

- 46 -
/
Zadaniem zespołu sterującego jest oddziaływanie na rozdzielacz. Jak widać na rysunku, zespoły sterujące elementów złożone są z szeregu jednakowych segmentów, co umożliwia budowę elementów o różnej liczbie sygnałów wejściowych.
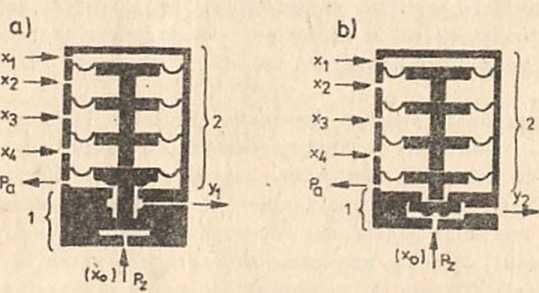
Rys.2.14. Elementy logiczne systemu 1IERAL0G: a) element alternatywy; b; element NOR
W stanie, gdy wszystkie sygnały wejściowe są zerami, płytka zespołu przełączającego w obu elementach utrzymywana jest w górnym położeniu. W elemencie alternatywy wyjście połączone jest wtedy z atmosferą fy^=0), w elemencie NOR - z zasilaniem (y2=l). Pojawienie się sygnału jedynkowego (odpowiednio wysokiego ciśnienia)na którymkolwiek wejściu powoduje przełączenie rozdzielacza i zmianę stanu sygnału wyjściowego. Zatem elementy realizują funkcje
y1 o x1 + x2 + x3 + *4 y2 * x1 + x2 +
Przez wprowadzenie w miejsce zasilania elementu sygnału binarnego Xq, otrzymuje się element bierny. W takim układzie element alternatywy realizuje funkcję
y1 “ Vr*1 + z2 + x3 + x4}
a element NOR
y2 a V Cx1 + x2 + x3 + x4*
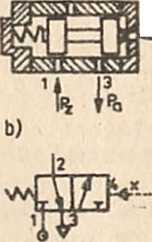
kład takiego elementu, symbol i sposób współpracy z siłownikiem pneumatycznym jednostronnego działania pokazano na rys.2.15. Element ten realizuje Ibnkcję powtórzenia. Pfrzez zamianę bocznych pokryw elementu można go przekształcić w element negacji. ITa^omia&t wprown-dzejuc ■/ miejsce zasilania sygnał binarny otrzymuje się bierny oleipent koniunkcji.
Ze względu na możliwość realizacji koniunkcji, zastopowanie w układzie elementów biernych może prowadzić do zmniejszenia liczby elementów, niezbędnych do realizacji danego układu.
Do sterowania płynowymi elementami wykonawczymi o dużych mocach stosowane są elementy suwakowe (tłoczkowe) pneumatyczne albo hydrauliczne. Przy-
Q) \\ c)
4 x
w

Ry8.2.15. Element suwakowy: a)
schemat; b) symbol; c) współpraca z siłownikiem jednostronnego działania
Element ten jest elementem
'trzydrogowym (drogi 1, 2, 3) monostabilnym (stabilne położenie suwake wynuszsne jest przez sprężynę).
Do et* ' •*» ania siłowników dwustronnego działania wykorzystuje «lę bardziej złożone rodzaje elementów suwakowych -rys. 2.16.

b,|E
M
Rys.2.16. Wykorzystanie elementów suwakowych do sterowania siłownikiem pneumatycznym dwustronnego działania: a) sterowania za pomocą zaworu czte-rodrogowego monostabilnego; b) sterowanie za pomocą zaworu czterodrogowe-go bistabilnego
Elementy suwakowe stosowane są jedynie do realizacji bardzo prostych funkcji. W układach bardziej złożonych, bu-
Wyszukiwarka
Podobne podstrony:
Untitled Scanned 57 (2) 60 GEOMETRIA ANALITYCZNA 376. Okrąg przedstawiony na rysunku jest styczny do
Untitled Scanned 83 (2) 86 STERE 86 STERE 603. 50 m Na rysunku przedstawiony jest projekt basenu pły
Henryk Juszka, Marcin Tomasik, Stanisław Lis, Grzegorz Haczyk Zadaniem regulatora PID jest oddziaływ
17370 Untitled Scanned 124 126 ZADANIA ZAMKNIĘTE 913. Liczba log.»72 - 5log .! 2 jest równa
Untitled Scanned 119 121 ZADANIA ZAMKNIĘTELICZBY RZECZYWISTE 852. Dany jest zbiór A ={^ 4* ~p “"
Untitled Scanned 120 122 ZADANIA ZAMKNĘTE 864. 865. Dziedziną funkcji /(.v) = V2-x ->/4-.v jest z
Untitled Scanned 122 124 ZADANIA ZAMKNIĘTE 888. Wielomian H (.r) jest iloczynem wi
Untitled Scanned 124 126 ZADANIA ZAMKNIĘTE 913. Liczba log.»72 - 5log .! 2 jest równa a) log
Untitled Scanned 120 122 ZADANIA ZAMKNĘTE 864. 865. Dziedziną funkcji /(.v) = V2-x ->/4-.v jest z
Untitled Scanned 122 124 ZADANIA ZAMKNIĘTE 888. Wielomian H (.r) jest iloczynem wi
46815 Untitled Scanned 23 (5) ku do pokolenia własnego dziecka. Z dwóch osób w tym sin mym wieku sta
Untitled Scanned 119 121 ZADANIA ZAMKNIĘTELICZBY RZECZYWISTE 852. Dany jest zbiór A ={^ 4* ~p “"
ScannedImage 19 46 Wprowadzenie malną procedurą jest jego sprawdzanie, a nie doszukiwanie się jego ź
więcej podobnych podstron