P1080268
6.5. Programowanie robotów mobilnych
6. Programowanie robotów przemysłowych
Etap
pierwszy
(6.1)
Mm
0000000 ® ® 9 @ ® ® 9 o ocl®®o o O O O^bO o o o O 000 o o 0000000 $ 9 9 9 9 9 $ r=3
O O © O O O O OOO 0,0 o o oo ąto o 0.0 o
o o « #Vb o 0.000.0 o o 00 0 0(0-0 o.
wr,=l
Po pewnym czasie większość mrówek będzie wędrować najkrótszą trasą.
.. • t,\nA fofrttnnnn 7 SSnsSrii ńarilie i ahv śnieżka hvła alrtimi..-
|
być stale uczęszczana | |
|
1 _____lest-fik— | |
O
A _____Sfc.tSfc-
Etap
końcowy
Rysunek 6.12. . _
Etapy poszukiwania optymalnego toru kolonii mrówek
Algorytm realizujący zadanie znajdowania najlepszego toru można przedstawić jako graf złożony z wierzchołków oznaczających punkty trasy w przestrzeni poszukiwań. Łuki, które łączą te punkty, to możliwe warianty drogi, natomiast wagi łuków oznaczają stężenie feromonu.
Działanie algorytmu może być realizowane w kilku etapach:
- najpierw należy wybrać wierzchołki, połączyć je łukami oraz przypisać początkowe stężenie feromonu,
- wygenerować kolonię mrówek,
- każda mrówka, która dotrze do wierzchołka, wybiera kierunek do węzłów sąsiednich przez sprawdzenie wag,
- prawdopodobieństwo wybom kierunku do wierzchołka j wynosi o>j
keN,
- następnie waga łuku dla wybranego wierzchołka zostaje wzmocniona
CDjj <r-6)ij+ &0)ij (6.2)
- takie działania skutkują po pewnym czasie znalezieniem optymalnej drogi.
Ważną cechą feromonu jest jego parowanie, gdy źródło pokarmu się wyczerpie, ślad wyparuje, a mrówki zrezygnują z podążania tą trasą. Podczas stosowania algorytmu do konkretnych zadań należy więc dodatkowo opisać mechanizm parowania feromonu. Parowanie feromonu można realizować przez losowe zmniejszanie wag łuków.
0,7. Sieci komórkowe do planowania trasy dla robota mobilnego
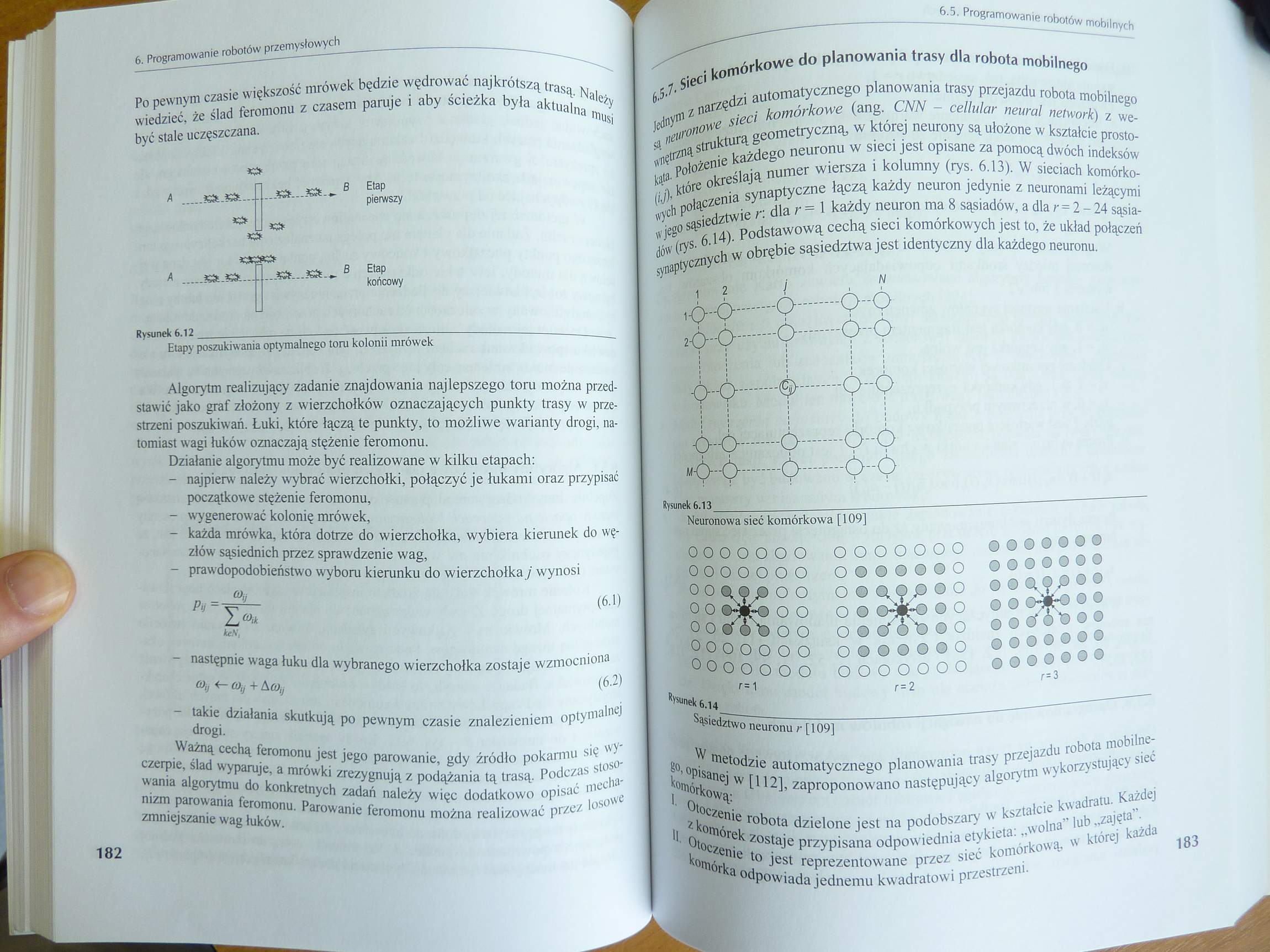
jednym z narzędzi automatycznego planowania trasy przejazdu robota mobilnego są neuronowe sieci komórkowe (ang. CNN - cellular neural network) z wewnętrzną strukturą, geometryczną w której neurony są ułożone w kształcie prostokąta. Położenie każdego neuronu w sieci jest opisane za pomocą dwóch indeksów (ij), które określają numer wiersza i kolumny (rys. 6.13). W sieciach komórkowych połączenia synaptyczne łączą każdy neuron jedynie z neuronami leżącymi w jego sąsiedztwie r: dla r == 1 każdy neuron ma 8 sąsiadów, a dla r = 2 -24 sąsiadów (rys. 6.14). Podstawową cechą sieci komórkowych jest to, że układ połączeń synaptycznych w obrębie sąsiedztwa jest identyczny dla każdego neuronu.
1 2 -'Vf r N
|
<ę»o-~- | ||
|
Hi |
|r6- 6 | |
|
mm* |
mm | |
|
mm |
!f-ó-o | |
|
i§l-l |
fysunek^_
Neuronowa sieć komórkowa [109]
O o o o o o o o o o m ® • o q <§> • i® $ o
o o o-*ho> ® o o m «r 4 « • o b o ® ® ® © o Mfpl o o o o
r=2
tuneli 6.14^_
Sąsiedztwo neuronu r [109]
W metodzie Automatycznego planowania trasy przejazdu robota mobilne-opisanej w [112],: zaproponowano następujący algorytm wykorzystujący sieć korkową:
• Otoczenie robota dzielone jest na podobszary w kształcie kwadratu. Każdej z komórek zostajfe przypisana odpowiednia etykieta: „wolna” lub „zajęta”. Otoczenie to jest reprezentowane przez sieć komórkową w której każda komórka odpowiada jednemu kwadratowi przestrzeni.
A.
183
182
Wyszukiwarka
Podobne podstrony:
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
74342 P1080253 6Programowanie robotówprzemysłowych 6.1. Wprowadzenie do programowania robotów Progra
22382 P1080257 6. Programowanie robotów przemysłowych 125/109 = 006 (115*I23)+I03/I12/I02 = 002 w kt
24317 P1080267 6. Programowanie robotów przemysłowych li wierzchołek został wygenerowany uprzednio,
19627 P1080242 5. Starowanie robotów przemysłowych Sterowanie przyciskowe jest zbliżone do programow
75131 P1080265 6. Programowana robotom przem>skjwych W metodach globalnych zakłada się znajomość
więcej podobnych podstron