P1080322

9. Układy sensoryczne
Tam. gdzie nie można stosować czujników fotoelektrycznych. np. w ośr^ kscli mak) przezroczystych. są stosowane czujniki pojemnościowe bądź czuta indukcyjne do wykrywania przedmiotów metalowych.
Czujniki pojemnościowe (rys. 9.24) mają możliwości detekcji obiektów niemetalicznych- Na pracę tego typu przetwornika nie ma wpływu rodzaj identy. Skowanego przedmiotu. Potrafią wykryć obecność i położenie zarówno cij| stałych, jak i ciecz}'.
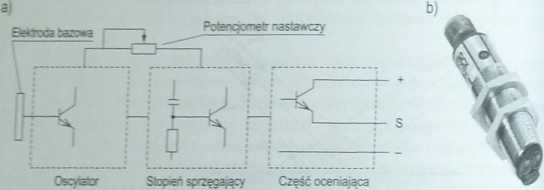
8?wseŁ 9-24 _
Pojemnościowy okład pomiarowy; a) schemat, b) widok
Zadaniem czujników indukcyjnych (rys. 9.25) jest pomiar bądź też wykrycie aktualnej pozycji przedmiotów. Obiekty przez nie rozpoznawane cechują się przewodzeniem prądu elektrycznego oraz metaliczną budową.
indukcyjny czujnik zbliżeniowy
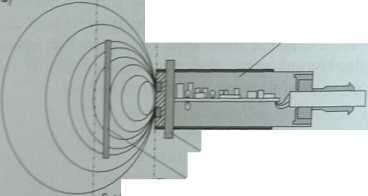
Rywaiek 9.25 _
Indukcyjny czujnik zbliżeniowy; a) schemat działania, b) widok
Metalowe zamocowanie czujnika
Bement pobudzający ze stal St37
Dla Sł37 S=Sn

9.5.3. Układy wizyjne rozpoznające obrazy
ozb&l
Począwszy od lat pięćdziesiątych ubiegłego wieku, pojawia się ogromna 11 prac teoretycznych, modeli, programów komputerowych i rozwiązań 290 nych na temat analizy i rozpoznawania obrazów. Obecnie do &n
i rozpoznawania obrazów są stosowane metody cyfrowe, wykorzystujące metody matematyczne: statystyki, teorii podejmowania decyzji, teorii informacji, a także metody sztucznej inteligencji, np. sieci neuronowe i opracowane na ich podstawie specjalistyczne oprogramowanie. Metody przetwarzania obrazów są przedstawiane w bardzo licznej literaturze, z zacytowanej w tej książce można wymienić [17, 92, 120, 121]. Dlatego też omówiono tu tylko w zarysie działanie układów wizyjnych i metody przetwarzania obrazów, a bardziej skoncentrowano się na specyfice zastosowania układów wizyjnych, przy czym informacje na ten temat przewijają się też w rozdz. 5 i 13.
Układy wizyjne wprowadzają nowe standardy dla robotów- przemysłowych i otwierają nowe, do tej pory niedostępne, obszary zastosowań. Fragmenty linii produkcyjnych czy też całe aplikacje do niedawna obsługiwane przez człowieka, ze względu na zmienność produktów i brak pozycjonowania elementów, mogą być teraz automatyzowane.
Typowy system wizji maszynowej składa się z kilku elementów spośród niżej wymienionych [17]:
- jedna lub więcej cyfrowych lub analogowych kamer (czarno-biała lub kolorowa) wraz z optyką,
- przystosowane do danego systemu, wyspecjalizowane źródła światła (np. diody LED, światła fluorescencyjne, lampy halogenowe itd.).
- oprogramowanie do przetwarzania obrazu i wykrywania cech wspólnych obrazów, które może być zainstalowane w układzie sterowania robota (patrz p. 5.5.2), w komputerze PC lub może to być procesor wbudowany,
- urządzenia I/O (wejście/wyjście) lub linki komunikcyjne (np. RS-232) wykorzystyw ane do przesyłania raportów z wynikami pracy systemu.
W niektórych przypadkach wszystkie podane tu elementy w chodzą w skład jednego urządzenia, tzw. inteligentnej kamery).
^•53,1. Metody przetwarzania obrazów
* metodach przetwarzania obrazów można wyróżnić trzy podstawowe poziomy Zliczeń, różniące się od siebie rodzajem realizowanych operacji, poziomem ^ożoności obliczeniowej, a także ilością oraz zorganizowaniem przetw arzanych danych (rys. 9.26).
1) Blok wstępnego przetwarzania obrazu realizuje następujące operacje:
- przetworzenie analogowego zapisu obrazu na cyfrowy,
- lokalizację obiektu w obrazie,
- wydzielenie zmian jaskrawości w obrazie-oknie,
- aproksymację konturów obiektu.
Działania te mają na celu: eliminację zakłóceń, wydobywanie obiektu 7 tła, detekcję krawędzi, ustalanie poziomów szarości pikseli należących do °k'ektu na podstawie histogramu, równoważenie histogramu itp.
Wyszukiwarka
Podobne podstrony:
* termin zbiorczy, zastępuje także pojęcie przewozu tam, gdzie nie ma pojazdów i tym samym nie można
DSC00279 (27) byś zastosowany także tam, gdzie z pewnych względów nie można użyć pasywnego filt
DSC00280 (25) być zastosowany także tam, gdzie z pewnych względów nie można użyć pasywnego filt
30031 P1080313 9. Układy sensoryczne Rysunek^__ Klasyfikacja stosowanych w robotach przemysłowych uk
P1080319 9. Układy sensoryczne 9.4.2. Przetworniki siły i naprężeń Wyposażenie chwytaka w przetworni
P1080324 9. Układy sensoryczne - odległości między charakterystycznymi punktami ob
IMG! BLOK 1 Wyrazów z „u” do zapamiętania jest bardzo dużo. Piszemy je tam, gdzie nie możemy zastoso
IMAG0448 (4) Opisanego sposobu przedstawiania elementu w przekroju połówkowym nie można st
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
27 rowów odpływowych, a to wszędzie tam, gdzie nie są one konieczne. Korpus drogi (grobla ziemna) je
więcej podobnych podstron