108 3
108 Układy regulacji automatycznej
108 Układy regulacji automatycznej
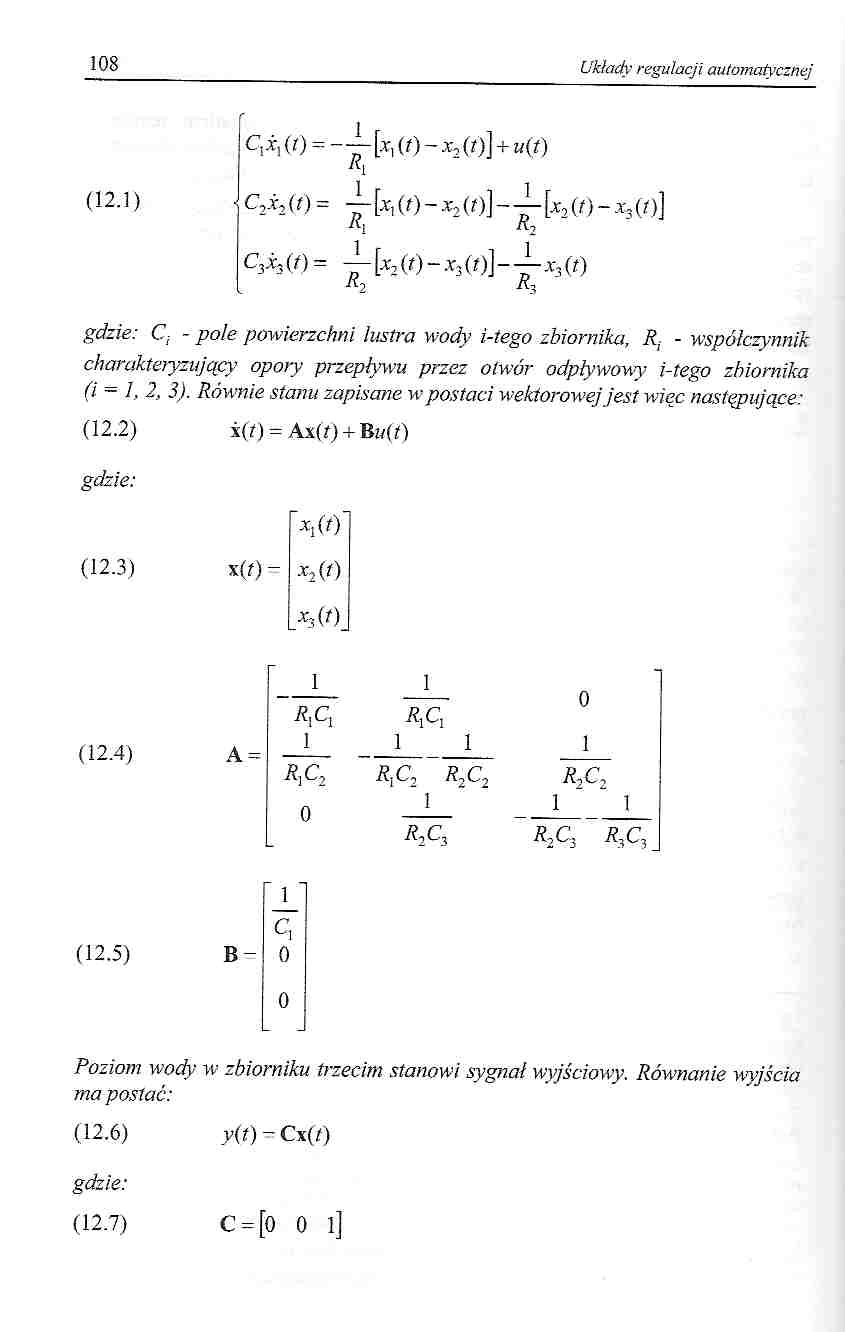
(12.1)
y?
ęX,(0 = -TJ-[*,(f)- X2 OO] + «(0
C2x2 (O = ~ ix\ (O - *2 (o] - TT [x2 (t) - *3 {t)]
Rj
C3x3 (/) = -J- [x2(af) - x3 (?)] - x3 (O
gdzie: C, - /?o/e powierzchni lustra wody i-tego zbiornika, R, - współczynnik charakteryzujqcy opory przepływu przez otwór odpływowy i-tego zbiornika (i = 1, 2, 3). Równie stanu zapisane w postaci wektorowej jest wiec następujące:
1
(12.4)
A =
(12.5)
B-
i i
0
1
r:c2
RjC, R2C, ' 1
R2C3
r2c2
1
1
R-,C} R',C3
O
o
|
(12.2) |
x(t) = Ax(/) + Bm(?) | ||
|
gdzie: |
\(t) | ||
|
(12.3) |
x(?) - |
x2(t) | |
|
x-{t) | |||
Poziom wody: w zbiorniku trzecim stanowi sygnał wyjściowy. Równanie wyjścia ma postać:
y{t) - Cx(/)
C = [0 O l]
(12.6)
gdzie:
(12.7)
Wyszukiwarka
Podobne podstrony:
m Układy kombinacyjne a sekwencyjne yi=fi(x1,x2,..xn) yi^fi(x1 ,x2.-xn) -występują elementy
URA Wielkość zadana Regulator PI Obiekt regulacji r 11 (0.05 s + l)2 kp 1 + v Tj s
poziom skok xj Regulacja Wieloparametrowa H = 12.19 cm U = 0.00 H [cm] 15 - T = 18.55 U =
img399 2 REGULACJA METABOLIZMU 12. BIOSYNTEZA I DEGRADACJA NUKLEOTYDÓW
CCI00038 42 A ..Jankowski Rys.2,11 regulacji. Rys.2.12. ciaLI2] . Charakteryslyki alMialom U - f(l„J
7 Przemysłowe Systemy Automatyki - 12. Stanowisko badawcze Stanowisko laboratoryjne (rys. 9) składa
cw 2 automatyka (2) W^Tit-r* Ą«lV j_____ I j °tj uIaT»
66583 RAPIS019 3 RACHUNEK PRAWDOPODOBIEŃSTWA I STATYSTYKA Egzamin - Automatyka - 12.09.2006 1. (5 pk
SP?069 RACHUNEK PRAWDOPODOBIEŃSTWA I STATYSTYKA Egzamin - Automatyka - 12.09.2006 i. (5 pkt) Zmienna
automatyka�4 2.12 oscylacyjny *0 — 1 7*0 = 150 ę - 0.4 liniowo narastające 3.12 G 01 G„ = PD
automatyka 12 I CO^ ^ 11-^3 y*Q CX U U> lIrv^o ^c^j p^S+CuuJ
automatyka 12 I CO^ ^ 11-^3 y*Q CX U U> lIrv^o ^c^j p^S+CuuJ
Kontroler Wózka C0M19 ReceiyedRoute Create Start Route 12.5 on AUTOMATYCZNY o 12.6
Slajd6 (108) Odpowiednie układy scalone stanowią „połączenie" (- bridge) pomiędzy CPU oraz magi
więcej podobnych podstron