15190 P1050621
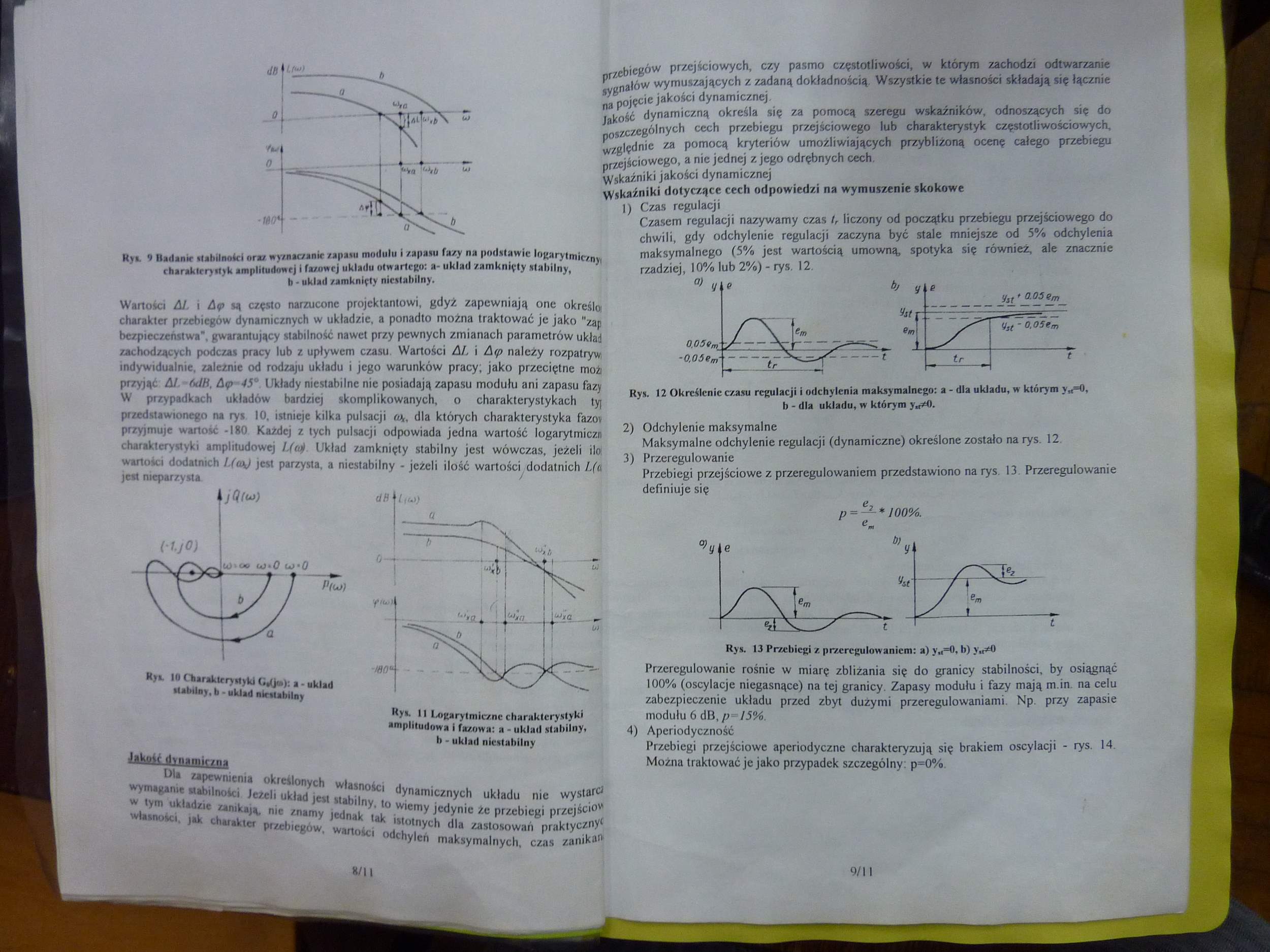
Ryt. 9 Badanie stabilności oraz wymieranie /.apatii modułu i zapasu fazy na podstawie logarytmiczny) charakterystyk amplitudowej I fazowej układu otwartego: a* układ zamknięty stabilny, b • układ zamknięty niestabilny.
przebiegów przejściowych, czy pasmo częstotliwości, w którym zachodzi odtwarzanie sygnałów wymuszających z zadaną dokładnością. Wszystkie te własności składają się łącznie na pojęcie jakości dynamicznej.
Jakość dynamiczną określa się za pomocą szeregu wskaźników, odnoszących się do poszczególnych cech przebiegu przejściowego lub charakterystyk częstotliwościowych, względnie za pomocą kryteriów umożliwiających przybliżoną ocenę całego przebiegu przejściowego, a nie jednej z jego odrębnych cech.
Wskaźniki jakości dynamicznej
źniki dotyczące cech odpowiedzi na wymuszenie skokowe Czas regulacji
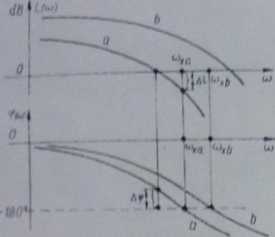
Czasem regulacji nazywamy czas tr liczony od początku przebiegu przejściowego do chwili, gdy odchylenie regulacji zaczyna być stale mniejsze od 5% odchylenia maksymalnego (5% jest wartością umowną, spotyka się również, ale znacznie rzadziej, 10% lub 2%) - rys. 12.
Rys. 12 Określenie czasu regulacji i odchylenia maksymalnego: a - dla układu, w którym y^=0, b - dla układu, w którym y^O.
Wartości Al. i A? są często narzucone projektantowi, gdyż zapewniają one określa charakter przebiegów dynamicznych w układzie, a ponadto można traktować je jako "zap bezpieczeństwa”, gwarantujący stabilność nawet przy pewnych zmianach parametrów układ zachodzących podczas pracy lub z upływem czasu. Wartości AL i A<p należy rozpatryw, indywidualnie, zależnie od rodzaju układu i jego warunków pracy; jako przeciętne moi przyjąć Al. <*IH, Aę 45° Układy niestabilne nie posiadają zapasu modułu ani zapasu fazy W przypadkach układów bardziej skomplikowanych, o charakterystykach ty] przedstawionego na rys 10. istnieje kilka pulsacji a*, dla których charakterystyka fazot przyjmuje wartość -180 Każdej z tych pulsacji odpowiada jedna wartość logarytmiczn charakterystyki amplitudowej l.(o$ Układ zamknięty stabilny jest wówczas, jeżeli iloj wartości dodatnich l.(a\J jest parzysta, a niestabilny - jeżeli ilość wartością dodatnich L(t> jest nieparzysta

stabilny, b - układ niestabilny
Rys. 11 Logarytmiczne charakterystyki amplitudowa i fazowa: a - układ stabilny, b - uldad niestabilny
Jakek dynamiczna
Dla zapewnienia określonych własności dynamicznych układu nie wystard wymaganie stabilności Jeżeli układ jest stabilny, to wiemy jedynie że przebiegi przejściom w tym układzie zanikają, nie znamy jednak tak istotnych dla zastosowań praktyczny^ własności, jak charakter przebiegów, wartości odchyleń maksymalnych, czas zanikun
8/11
2) Odchylenie maksymalne
Maksymalne odchylenie regulacji (dynamiczne) określone zostało na rys. 12.
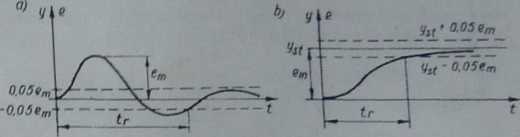
3) Przeregulowanie
Przebiegi przejściowe z przeregulowaniem przedstawiono na rys. 13. Przeregulowanie definiuje się
p = ^*100%. em
Rys. 13 Przebiegi z przeregulowaniem: a) y,r=0» b) y,t*Q
Przeregulowanie rośnie w miarę zbliżania się do granicy stabilności, by osiągnąć 100% (oscylacje niegasnące) na tej granicy. Zapasy modułu i fazy mają m.in. na celu zabezpieczenie układu przed zbyt dużymi przeregulowaniami. Np. przy zapasie modułu 6 dB, p=15%.
4) Aperiodyczność
Przebiegi przejściowe aperiodyczne charakteryzują się brakiem oscylacji - rys. 14. Można traktować je jako przypadek szczególny : p=0%.
9/11
Wyszukiwarka
Podobne podstrony:
dostępności do sieci komunikacyjnej oraz składnika losowego. Ponadto model zakłada na podstawie dany
Tabela 1 Zakres badania due diligence Sfera Objaśnienie Analiza finansowa Ocena na podstawie
2 Badania naukowe były identyfikowane w sklepach internetowych i porównywarkach cen na podstawie kod
ie i badaniaJzj. Teol oraz konsultowaniu społecznym propozycji zmian przejściowych i docelowych. Ich
statystyka skrypt�37 I I Przykład 2.1 I Podczas badania stabilności operacji obróbki tulejek na auto
Badania sejsmiczne oraz profilowania otworów (pomiary geofizyczne), dają tylko ogólny, często ilości
B.W4. różnicuje procedury postępowania z pacjentką, z uwzględnieniem rodzaju badania diagnostycznego
Celem zajęć jest zwrócenie uwagi na rolę oceny jakości życia w praktyce medycznej i badaniach klinic
* </> cc o o O Z o -I Tomasz Małolepszy N METODY BADANIA STABILNOŚCI ,.
badania: duże oraz niewymagające skomplikowanych metod odłowu i obserwacji. Są też wrażliwe na zmian
70 330* Mnszyna do badania zużycie oraz do wyznaozanla współczynnika taroia* Mechanik R* 45: 1972 nr
2. badanie stabilności procesu technologicznego, ocena próbek pochodzących z różny
statystyka skrypt�37 I I Przykład 2.1 I Podczas badania stabilności operacji obróbki tulejek na auto
więcej podobnych podstron