29439 P1080353 (2)
12. Badanie dokładności robotów przemysłowych
|
APX =(x-xc) | |
|
APy ={y-yc) |
02.2) |
|
*4* 1 li Aj |
023) |
|
— 1 x=zLxj |
02.4) 02.5) |
|
mą | |
|
n J*i |
(12.6) |
|
N| II a 1 — iM» |
(12.7) |
gdzie: x, y, z - współrzędne środka ciężkości punktów osiągniętych przez tę samą pozycję zadaną n razy, xc, yc, zc — współrzędne zadanej pozycji, Xj, yjt Zj - współrzędney-tej pozycji osiągniętej;
|
1 dokładność orientacji | |
|
APa =(a-ae) |
(12.8) |
|
AP„=(b-bc) |
(12.9) |
|
APC =(ć-cc) |
(12.10) |
|
— 1 |
(12.11) |
|
jm» | |
|
nJ~ 1 |
(12.12) |
|
| l«f. 1 =-Z>y |
(12.13) |
|
gdzie: ac, bcy ce - wartości kątów zadanej pozycji, |
aJt bj, Cj— wartości kątów |
/-tej pozycji osiągniętej.
Uzyskane wartości są wartościami kątów osiągniętych przez tę samą pozycję zadaną n razy.
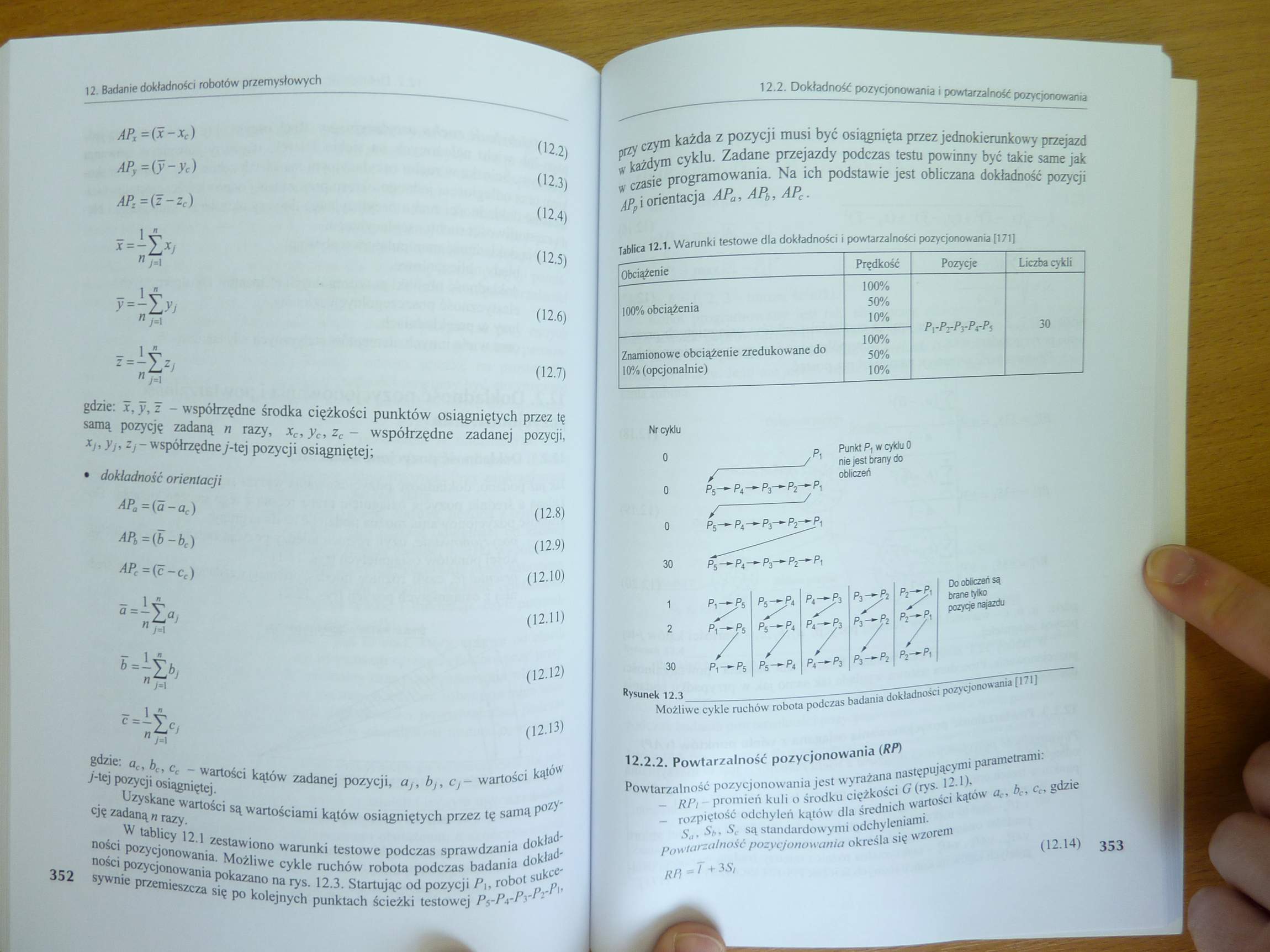
W tablicy 12.1 zestawiono warunki testowe podczas sprawdzania dokładności pozycjonowania. Możliwe cykle ruchów robota podczas badania dokładności pozycjonowania pokazano na rys. 12.3. Startując od pozycji P\, robot sukce-352 sywnie przemieszcza się po kolejnych punktach ścieżki testowej P$-PĄ-P^-PrPu
12.2. Dokładność pozycjonowania i powtarzalność pozycjonowano
przy czym każda z pozycji musi być osiągnięta przez jednokierunkowy przejazd w każdym cyklu. Zadane przejazdy podczas testu powinny być takie same jak w czasie programowania. Na ich podstawie jest obliczana dokładność pozycji APp i orientacja APa, APb, APC.
Tablica 12.1. Warunki testowe dla dokładności i powtarzalności pozycjonowania [171]
|
Obciążenie |
Prędkość |
Pozycje |
Liczba cykli |
|
100% obciążenia |
100% 50% 10% |
P\~f*7~P3~P(~P5 |
30 |
|
Znamionowe obciążenie zredukowane do 10% (opcjonalnie) |
100% 50% 10% |
|
Nr cyklu 0 |
p. |
Punkt Py w cyklu 0 |
|
1 |
nie jest brany do obliczeń | |
|
/ | ||
|
0 |
P5— Pa-^Pz— Pr~ P\ | |
|
0 |
/ ^ | |
|
30 |
P5—P4—p3—- #V— Pi |
|
1 P1-^P6 |
p= —P. |
p4—p3 |
P3 —Po |
DoobBczeńsą | |
|
brane tyto | |||||
|
2 Pl~/5 |
y |
*7 |
V |
V |
pozycje najazdu |
|
30 Pi—P5 |
p5—P4 |
p4—p3 |
p3—p2 |
p2—Pi |
Rysunek 12.3___ ' „
Możliwe cykle ruchów robota podczas badania dokładności pozycjonowania [171]
12.2.2. Powtarzalność pozycjonowania (RP)
Powtarzalność pozycjonowania jest wyrażana następującymi parametrami:
- RPi ~ promień kuli o środku ciężkości G (rys. 12.1),
— rozpiętość odchyleń kątów dla średnich wartości kątów oc, bC9 cc, gdzie S0. Sb* •>«.- są standardowymi odchyleniami.
(12.14)
powtarzalność pozycjonowania określa się wzorem RPi -/* + 3S,
Wyszukiwarka
Podobne podstrony:
29439 P1080353 (2) 12. Badanie dokładności robotów przemysłowych APX =(x-xc) APy
P1080353 (2) 12. Badanie dokładności robotów przemysłowych APX =(x-xc) APy
P1080358 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
43177 P1080355 (2) 12. Badanie dokładności robotów przemysłowych 1 cykl Ścieżka 1 —► P Ścieżka 1 —
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
73429 P1080354 (2) 12. Badanie dokładności robotów przemysłowych przy czym 02.15) 02.16) h = J(xj -*
P1080352 (2) 12. Badanie dokładności robotów przemysłowych z zachowaniem tych samych warunków środow
P1080354 (2) 12. Badanie dokładności robotów przemysłowych przy czym 02.15) 02.16) h = J(xj -*Y +(yj
P1080355 (2) 12. Badanie dokładności robotów przemysłowych 1 cykl Ścieżka 1 —► P Ścieżka 1 —1►
P1080356 (2) 12. Badanie dokładności robotów przemysłowych Rysunek 118___ Relacja między punktem zad
P1080357 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080358 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
78504 P1080356 (2) 12. Badanie dokładności robotów przemysłowych Rysunek 118___ Relacja między punkt
38759 P1080357 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścież
67677 P1080352 (2) 12. Badanie dokładności robotów przemysłowych z zachowaniem tych samych warunków
P1080352 (2) 12. Badanie dokładności robotów przemysłowych z zachowaniem tych samych warunków środow
P1080354 (2) 12. Badanie dokładności robotów przemysłowych przy czym 02.15) 02.16) h = J(xj -*Y +(yj
więcej podobnych podstron