78504 P1080356 (2)
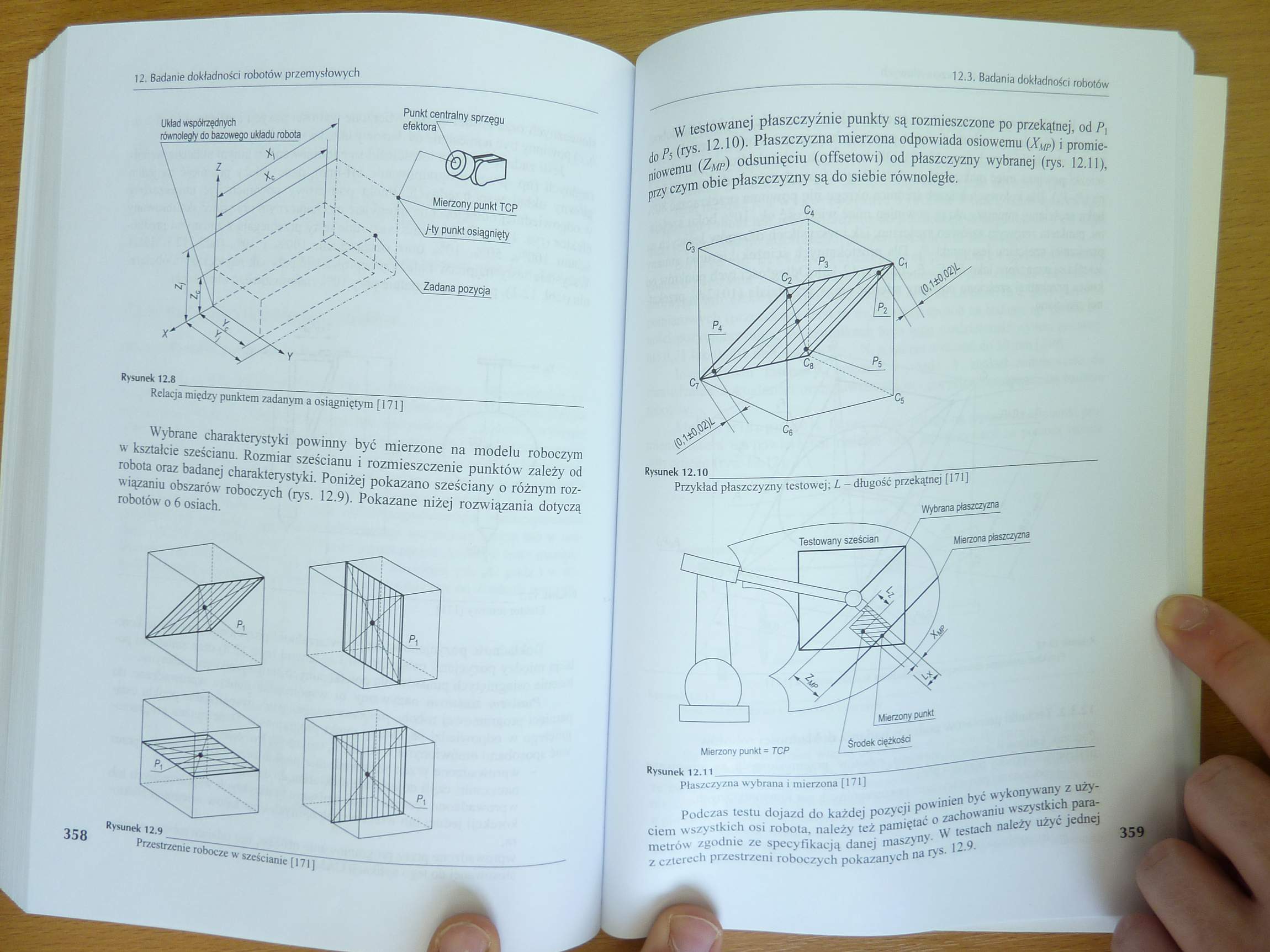
12. Badanie dokładności robotów przemysłowych
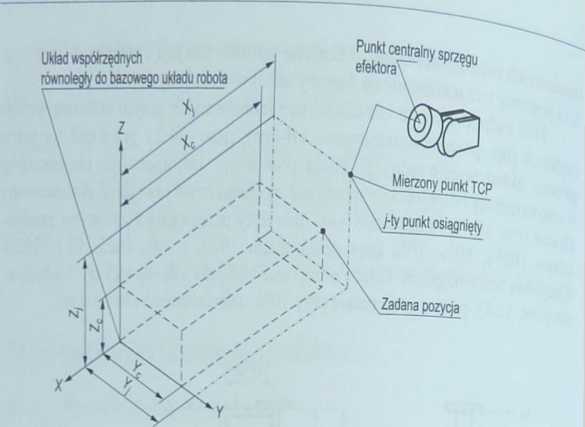
Rysunek 118___
Relacja między punktem zadanym a osiągniętym [171]
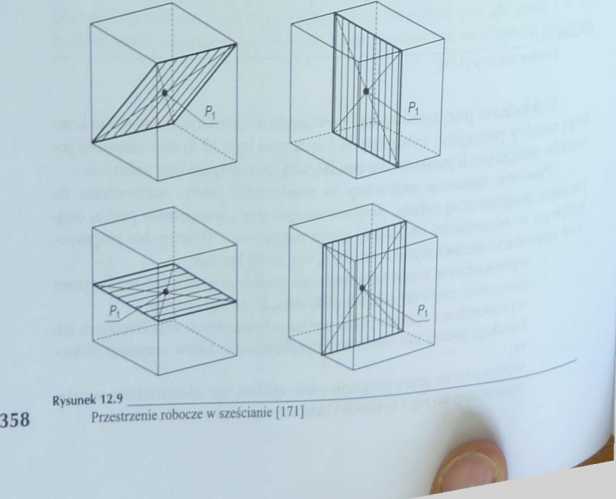
Wybrane charakterystyki powinny być mierzone na modelu roboczym w kształcie sześcianu. Rozmiar sześcianu i rozmieszczenie punktów zależy od robota oraz badanej charakterystyki. Poniżej pokazano sześciany o różnym rozwiązaniu obszarów roboczych (rys. 12.9). Pokazane niżej rozwiązania dotyczą robotów o 6 osiach.
W testowanej płaszczyźnie punkty są rozmieszczone po przekątnej, od P\ do P5 (rys. 12.10). Płaszczyzna mierzona odpowiada osiowemu (Xmp) i promieniowemu (Zmp) odsunięciu (offsetowi) od płaszczyzny wybranej (rys. 12.11), przy czym obie płaszczyzny są do siebie równoległe.
C4
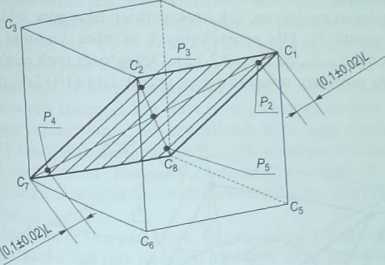
Rysunek 12.10 __
Przykład płaszczyzny testowej; L - długość przekątnej [171]
Wybrana płaszczyzna
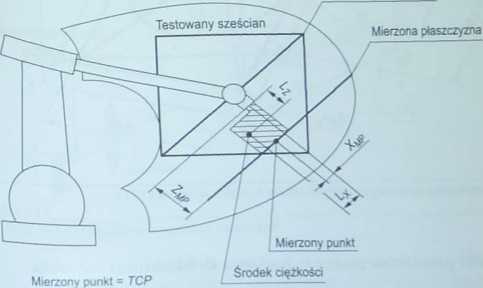
Rysunek 12.11_ - - '
Płaszczyzna wybrana i mierzona [171]
A
Podczas testu dojazd do każdej pozycji powinien być wykonywany z użyciem wszystkich osi robota, należy też pamiętać o zachowaniu wszystkich parametrów zgodnie ze specyfikacją danej maszyny. W testach należy użyć jednej j z czterech przestrzeni roboczych pokazanych na rys. 12.9. 359
Wyszukiwarka
Podobne podstrony:
P1080356 (2) 12. Badanie dokładności robotów przemysłowych Rysunek 118___ Relacja między punktem zad
P1080358 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
43177 P1080355 (2) 12. Badanie dokładności robotów przemysłowych 1 cykl Ścieżka 1 —► P Ścieżka 1 —
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
29439 P1080353 (2) 12. Badanie dokładności robotów przemysłowych APX =(x-xc) APy
73429 P1080354 (2) 12. Badanie dokładności robotów przemysłowych przy czym 02.15) 02.16) h = J(xj -*
P1080352 (2) 12. Badanie dokładności robotów przemysłowych z zachowaniem tych samych warunków środow
P1080353 (2) 12. Badanie dokładności robotów przemysłowych APX =(x-xc) APy
P1080354 (2) 12. Badanie dokładności robotów przemysłowych przy czym 02.15) 02.16) h = J(xj -*Y +(yj
P1080355 (2) 12. Badanie dokładności robotów przemysłowych 1 cykl Ścieżka 1 —► P Ścieżka 1 —1►
P1080357 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080358 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
29439 P1080353 (2) 12. Badanie dokładności robotów przemysłowych APX =(x-xc) APy
38759 P1080357 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścież
67677 P1080352 (2) 12. Badanie dokładności robotów przemysłowych z zachowaniem tych samych warunków
P1080352 (2) 12. Badanie dokładności robotów przemysłowych z zachowaniem tych samych warunków środow
P1080354 (2) 12. Badanie dokładności robotów przemysłowych przy czym 02.15) 02.16) h = J(xj -*Y +(yj
więcej podobnych podstron