86458 P1080378
13. Zastosowania robotów przemysłowych
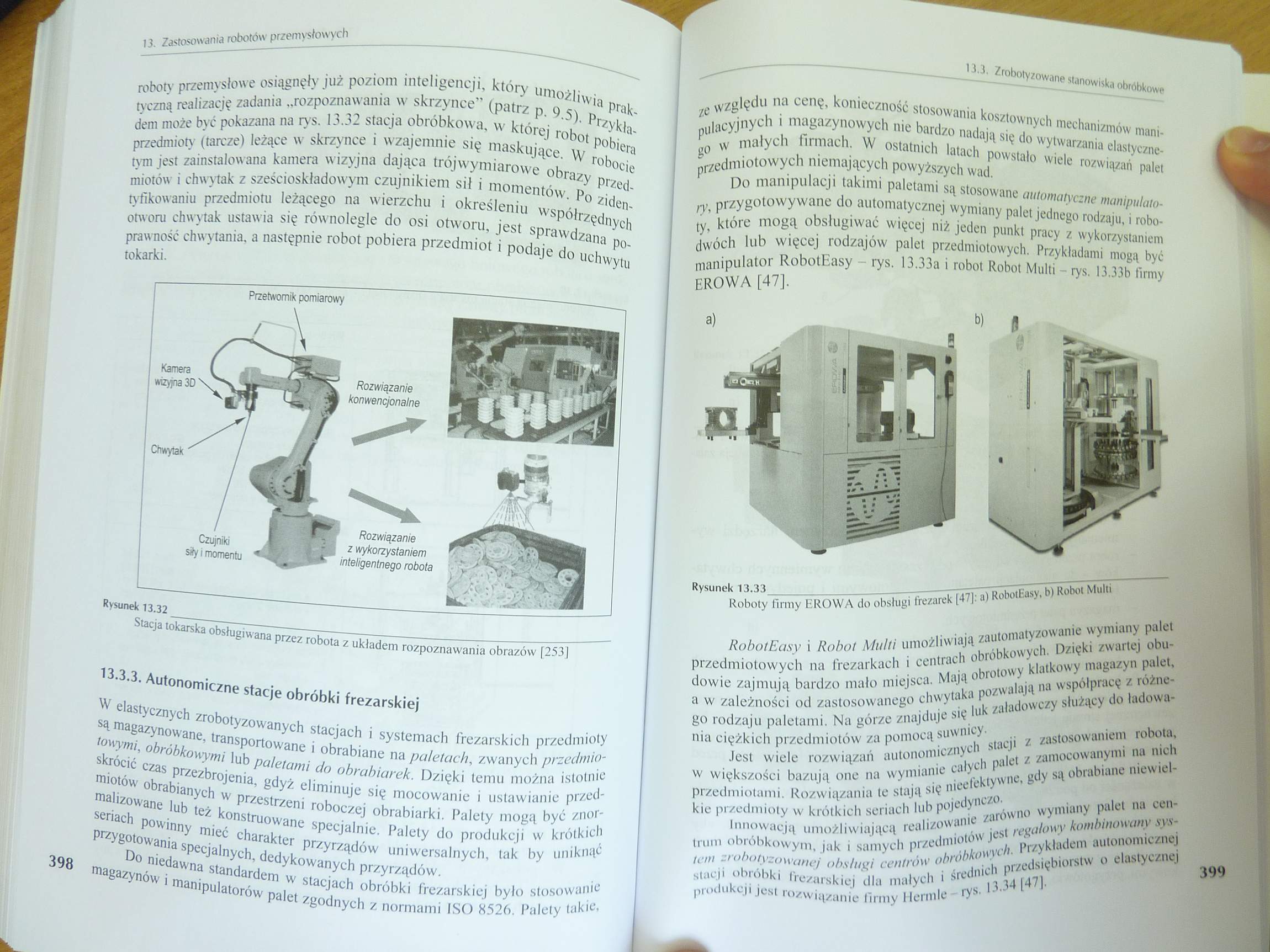
roboty przemysłowe osiągnęły już poziom inteligencji, który umożliwia praktyczną realizację zadania „rozpoznawania w skrzynce” (patrz p. 9.5). Przykładem może być pokazana na rys. 13.32 stacja obróbkowa, w której robot pobiera przedmioty (tarcze) leżące w skrzynce i wzajemnie się maskujące. W robocie tym jest zainstalowana kamera wizyjna dająca trójwymiarowe obrazy przedmiotów i chwytak z sześcioskładowym czujnikiem sił i momentów. Po zidentyfikowaniu przedmiotu leżącego na wierzchu i określeniu współrzędnych otworu chwytak ustawia się równolegle do osi otworu, jest sprawdzana poprawność chwytania, a następnie robot pobiera przedmiot i podaje do uchwytu tokarki.
13. Zastosowania robotów przemysłowych
Przetwornik pomiarowy
Chwytak
Kamera wizyjna 30

Rozwiązanie
konwencjonalne
Czujniki
styimomentu
Rozwiązanie z wykorzystaniem inteligentnego robota
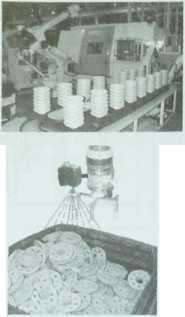
Rysunek 13132
Stacja tokarska obsługiwana przez robota z układem rozpoznawania obrazów [253]
13.3.3. Autonomiczne stacje obróbki frezarskiej
W elastycznych zrobotyzowanych stacjach i systemach frezarskich przedmioty są magazynowane, transportowane i obrabiane na paletach, zwanych przedmiotowymi, obróbkowymi lub paletami do obrabiarek. Dzięki temu można istotnie skrócić czas przezbrojenia, gdyż eliminuje się mocowanie i ustawianie przedmiotów obrabianych w przestrzeni roboczej obrabiarki. Palety mogą być znormalizowane lub też konstruowane specjalnie. Palety do produkcji w krótkich seriach powinny mieć charakter przyrządów uniwersalnych, tak by uniknąć przygotowania specjalnych, dedykowanych przyrządów.
Do niedawna standardem w stacjach obróbki frezarskiej było stosowanie magazynów i manipulatorów palet zgodnych z normami ISO 8526. Palety takie, 13.3. Zrobotyzowane stanowiska obróbkowe
i$e względu na cenę, konieczność stosowania kosztownych mechanizmów manipulacyjnych i magazynowych nie bardzo nadają się do wytwarzania elastycznego w małych firmach. W ostatnich latach powstało wiele rozwiązań palet przedmiotowych niemających powyższych wad.
Do manipulacji takimi paletami są stosowane automatyczne manipulatory, przygotowywane do automatycznej wymiany palet jednego rodzaju, i roboty, które mogą obsługiwać więcej niż jeden punkt pracy z wykorzystaniem dwóch lub więcej rodzajów palet przedmiotowych. Przykładami mogą być manipulator RobotEasy - rys. 13.33a i robot Robot Multi - rys. 13.33b firmy EROWA [47].
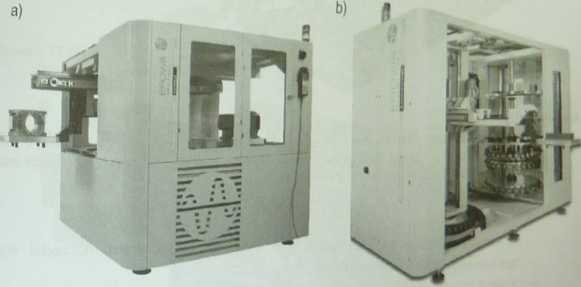
Rysunek 13.33_
Roboty firmy EROWA do obsługi frezarek [47]: a) RobotEasy. b) Robot Multi
RobotEasy i Robot Multi umożliwiają zautomatyzowanie wymiany palet przedmiotowych na frezarkach i centrach obróbkowych. Dzięki zwartej obudowie zajmują bardzo mało miejsca. Mają obrotowy klatkowy magazyn palet, a w zależności od zastosowanego chwytaka pozwalają na współpracę z różnego rodzaju paletami. Na górze znajduje się luk załadowczy służący do ładowania ciężkich przedmiotów za pomocą suwnicy.
Jest wiele rozwiązań autonomicznych stacji z zastosowaniem robota, w większości bazują one na wymianie całych palet z zamocowanymi na nich przedmiotami. Rozwiązania te stają się nieefektywne, gdy są obrabiane niewielkie przedmioty w krótkich seriach lub pojedynczo.
Innowacją umożliwiającą realizowanie zarówno wymiany palet na cer trum obróbkowym, jak i samych przedmiotów jest regałowy kombinowany sy: W.:'ohf!ugi centrów obróbkowych. Przykładem autonomiczni
produkcji jest rozn^anli fil ™!ych.‘ średnich Przedsiębiorstw o elastyczni P n an,e hrmy Hermie-rys. 13.34 [47].
Wyszukiwarka
Podobne podstrony:
P1080393 13. Zastosowania robotów przemysłowych Rysunek 13.55 Roboty pałetyzujące firmy Famie [255]
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
17266 P1080390 13. Zastosowania robotów przemysłowych układy sensoryczne, jest fakt, że prace montaż
więcej podobnych podstron