img089 (20)
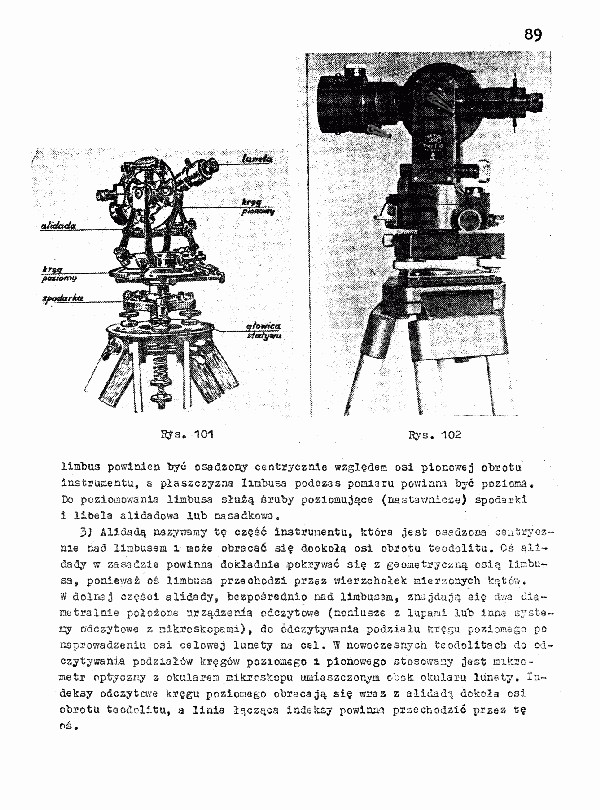

Rys. 102
Rjs. 101
limbu3 powinien być osadzony centryczMe względec osi pionowej obrotu instrumentu, a płaszczyzna linbusa podczas pomiaru powinni być poziom.
Co poziomowania ltnbusa służą óruby poziomujące (nastawaicsy) spodarki i libela alidadown lub nasadkowa.
3J Alidadą nazywamy tę część instrumentu, która jest osadzona ceutrycz-nie nad łlmbu33zu i tacie obracać się dookoła osi obrotu teodolitu. Oś a lida dy w zasadzie powinna dokładała pokrywać się z geometryczną osią lir.bu-sa, ponieważ oś liabusa przaofcpdzi przez wierzchołek mierzonych kątc/.v.
W dolrmj części a lida fiy, bezpośrednio nad llmbusam, znajdują aię dwa diametralnie położona urządzania odczytowe (nosiusze z lupar.il lub ino; eysta-izy odczytowe z nlktecsfcopenji), do odczytywania podziału kręgu poziomego cc ns prowadzeniu osi celowej lunety rui cel. ^ nowoczesny on teodolitach do cd-czytywania podziałów kręgów poziomego l pionowego stosowany jest 121 kr o -metr optyczny 2 okularem mikroskopu uiaioszczonym obok okularu lunety. Indeksy odczytowe kręgu poziomego obracają się wraz z alidadą dokoła esi obrotu teodolitu, a linie łącząca indeksy powlns-1 przechodzić przez tę od.
Wyszukiwarka
Podobne podstrony:
img089 sya. 101 Rys. 102 limbus powinien być osadzony centrycznic względec. 03i pionowej obrotu last
sieci9 -94- Rys.5.3.1. Hierarchia systemu sarzaczania sieci Proces zarządzania siecią SDH powinien b
Str 098 Z pierwszego równania, 20 u b = — - 3h, h Oz = ~ + (2 /To - 3)h. Obwód zwi
img039 (20) paracie w przeliczeniu na jego suchą masę. Wynik ten powinien być wyrażony liczbą o trze
Rys. 5.8.4. Przykładowa budowa piknomeirów raturze oznaczenia. Dlatego przyrząd powinien być zawsze
145 3 Układ kierowniczy 145 Rys. 12.8. Sposób ustawienia kół przednich — Jednocześnie powinien być
str162 I)/ 1 iotnloń strefy czuwania (rys. 10.26a) powinien być dobrany w zależności od: charakteru
więcej podobnych podstron