|
|
|
|
SERWOMECHANIZM
|
|
Celem ćwiczenia jest zapoznanie się z zasadą działania i właściwościami ruchowymi serwomechanizmu.
Uproszczony schemat blokowy badanego serwomechanizmu.
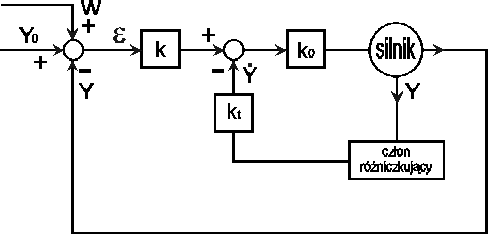
Powyższy układ ma możliwość otwarcia pętli sprzężenia zwrotnego Y i Y` w celu wyznaczenia charakterystyk czasowych układu zamkniętego.
Wyznaczenie charakterystyk czasowych układu zamkniętego.
Do wyznaczenia tych charakterystyk zamykamy pętlę sprzężenia zwrotnego sygnału Y oraz obserwujemy jego zmiany na skok jednostkowy. Podobnie jak w układzie otwartym charakterystyki są wyznaczane dla 3 różnych nastaw wartości k i k0, co odpowiada trzem różnym kolorom linii.
Badanie układu ze sprzężeniem tachometrycznym
W układzie zostały zamknięte obydwa sprzężenia zwrotne: sygnału Y oraz sygnału ![]()
. Za pomocą zmian wartości k i k0 układ serwomechanizmu został doprowadzony do stałych drgań, następnie badaliśmy wpływ zmian wartości wzmocnienia k0 i kt na przebieg oscylującej wartości Y.
Badanie wpływu sprzężenia tachometrycznego na oscylacje sygnału Y
Układ serwomechanizmu został doprowadzony do niegasnących oscylacji sygnału Y przy zamkniętym torze sprzężenia zwrotnego tego sygnału. Następnie został zamknięty tor sprzężenia zwrotnego sygnału ![]()
.
6. Uwagi i wnioski.
Przy zdejmowaniu ch-tyk Y=f(t) i ![]()
=f(t) mieliśmy badać wpływ zmian współczynników wzmocnienia k i k0 na przebieg Y=f(t), jednak podczas przebiegu tego badania przy zmniejszaniu k0 zwiększaliśmy k co w wyniku powodowało pewną kompensację wzmocnienia, gdyż obydwa wzmacniacze znajdują się na jednym torze, więc wzmocnienie wypadkowe kw=k·k0. Z tego powodu charakterystyki zarejestrowane przez ploter są bardzo blisko siebie. Analizując kształt i części składowe toru przy badaniu Y=f(t) wnioskujemy, że wzrostowi parametrów k i k0 powinna odpowiadać zwiększenie nachylenia charakterystyk, a tym samym zwiększeniu wartości kv.
Po zamknięciu toru sprzężenia zwrotnego sygnału Y widzimy, że sygnał ten powoduje ustabilizowanie się układu tzn. silnik zatrzymuje się. Zastosowane w układzie ujemne sprzężenie zwrotne sygnału Y powoduje zmniejszenie nachylenia. Znając poziom na którym ustabilizował się sygnał Y możemy określić wartość sygnału zadanego Y0. W stanie równowagi Y=Y0.
Badając ch-ki czasowe układu z ujemnym tachometrycznym sprzężeniem zwrotnym badaliśmy wpływ zmian k0 i kt na zachowanie się oscylującego sygnału Y ( układ na granicy stabilności). Przy zmniejszeniu k0 zmniejszyliśmy wartość wzmocnienia sygnału bezpośrednio przed silnikiem co spowodowało ustabilizowanie się układu: amplituda sygnału zmniejszyła się do zera, a okres gasnących drgań zmniejszył się : 2T>2T`, co jest bezpośrednim skutkiem zmniejszenia k0. Natomiast przy zmniejszeniu kt w torze ujemnego sprzężenia ![]()
nastąpił wzrost amplitudy oscylacji Y a zarazem okres drgań: 2T`>2T. Zmniejszenie k0 spowodowało zmniejszenie wartości ![]()
dochodzącego do węzła sumacyjnego ze znakiem ujemnym. W tym przypadku zmniejszeniu ![]()
odpowiada wzrost wartości sygnału dochodzącego do silnika.
Ostatnim etapem ćwiczenia było badanie wpływu sprzężenia zwrotnego ![]()
na układ w stanie oscylacji Y. Załączenie toru ![]()
powoduje ustabilizowanie się układu. W rzeczywistości po załączeniu sprzężenia zwrotnego amplituda drgań silnika nie doszła do zera tylko zmniejszyła się kilkakrotnie. Drgania o tak niskiej amplitudzie nie zostały zarejestrowane przez ploter. Dopiero po małym zwiększeniu kt układ ustabilizował się całkiem. Zastosowane sprzężenie tachometryczne powoduje tłumienie drgań układu.
Serwomechanizm
1
Wyszukiwarka
Podobne podstrony:
Automatyka- Serwomechanizm, Rok I
SERWOM~1, Rok I
Wyznaczanie przyspieszenia ziemskiego i dekrementu tłumienia wahadła prostego1, Automatyka
Wyznaczanie ciepła właściwego ciał stałych, Automatyka i Robotyka Rok I
Wyznaczanie ciepła właściwego ciał stałych, Automatyka i Robotyka Rok I
Badanie współczynnika lepkości za pomocą wiskozymetru Hšplera, Automatyka i Robotyka
sadowka 2010 (Automatycznie zapisany), 6 rok, medycyna sądowa sądówka, sądówka - Kuba, Giełda, Nowy
Wyznaczanie współczynnika absorpcji promieni gamma, Automatyka i Robotyka Rok I
automatyka sciaga, Akademia Morska, 2 rok', Semestr IV, Automatyka
Spr 1, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, EAP lab1
wzor strony tytulowej sprawozdania PA AiR, Studia ATH AIR stacjonarne, Rok III specjalność MiR - SM,
Systemy pomiarowo-regulacyjne, STUDIA PŁ, TECHNOLOGIA ŻYWNOŚCI I ŻYWIENIA CZŁOWIEKA, ROK II, SEM 3,
w5, STUDIA PŁ, TECHNOLOGIA ŻYWNOŚCI I ŻYWIENIA CZŁOWIEKA, ROK II, SEM 3, POMIARY AUTOMATYKA I ELEKTR
Projekt 2 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
tabelka, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, elementy aut
Projekt 1 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Pytania wrzuszczak, EiT Studia, III ROK, VI Semestr, Automatyka-Wrzuszczak
EAP-projekt, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, elementy
więcej podobnych podstron