19228 P1080382
Rysunek 13.40___
Prasa hydrauliczna: a) szkic wymiarowy, b) widok
• Do obsługi pras jest wymagana niewielka liczba czynności manipulacyjnych, więc robotyzacja jest o wiele łatwiejsza do realizacji niż w innych procesach technologicznych.
• Ściśle zdefiniowane są położenia obrabianego elementu: początkowe (magazyn, podajnik), robocze (prasa) i końcowe (paleta, przenośnik).
• Tory ruchu chwytaka robota nie są skomplikowane, krótki jest również czas stałego cyklu manipulacji.
• Dobry dostęp do obszaru roboczego prasy.
• Możliwość znacznego zmniejszenia liczby pracowników obsługujących prasy.
• Zwiększenie wydajności pras i poprawienie jakości wytłoczek.
• Możliwość połączenia pras w linię i w zintegrowany system wytwarzania.
• Względy BHP, tj. możliwość wycofania ludzi poza strefę pras, gdzie istnieje duże zagrożenie wypadkowe i wyeliminowanie uciążliwości pracy ze względu na monotonne czynności, duży hałas i drgania.
13.4.1.1. Konfiguracja zrobotyzowanych stanowisk obsługi pras
W zależności od wielkości manipulowanych przedmiotów i kolejności czynności są stosowane w tłoczniach różne konfiguracje zrobotyzowanych stanowisk obsługi pras i co za tym idzie różne struktury kinematyczne robotów. Robot zawsze wykonuje w sposób całkowicie automatyczny załadunek przygotówki (np. arkusza blachy) i rozładunek wytłoczki. Czynności są wykonywane w następującej sekwencji:
1. Rozdzielenie pojedynczej przygotówki (arkusza blachy) od stosu przeznaczonego do obróbki. Robot ustawia się ramieniem chwytającym nad stosem blach, chwyta arkusz pierwszy z góry i podnosi go. Konieczne jest zastosowanie omówionych dalej sposobów ułatwiających rozdzielanie blach.
2. Układ mierzący grubość arkusza sprawdza, czy robot pobrał tylko jedną I pizygotówkę Oeden arkusz blachy). W przypadku uchwycenia dwóch czy więk-I szej liczby arkuszy zostają powtórzone operacje rozdzielania arkuszy. Jeżeli
operacja nie zakończy się powodzeniem po uprzednio ustawionej liczbie prób, robot się zatrzyma i zasygnalizuje problem (alarm).
3. Robot ustawia arkusz do obróbki na stole prasy. Często ustawienie arkusza jest sprawdzane czujnikami potwierdzającymi obecność arkusza we właściwej pozycji.
4. Robot wraca nad paletę do załadunku i wysyła sygnał do rozpoczęcia operacji tłoczenia na prasie.
5. Po zakończonej operacji tłoczenia robot przenosi wytłoczkę do magazynu rozładowczego.
Można wyróżnić dwie, omówione dalej, zasadniczo różniące się konfiguracje zrobotyzowanych stanowisk i linii osługi pras.
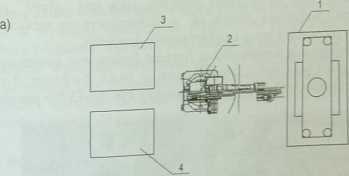
Pierwsza to jest rozmieszczenie pras przodem do siebie. W takiej konfiguracji stosuje się roboty przegubowe. Robot przegubowy umieszczony przed prasą lub dwa roboty jeden przed, a drugi za prasą- obsługują ją pomięty przenośnikami: dostarczającym i odbierającym obrobione półwyroby - rys.
Prasy tworzące linię (rys. 13.42) są ustawione przodem do siebie, a pomiędzy mmi znajdują się roboty i magazyny buforowe.
Ry'sun
1
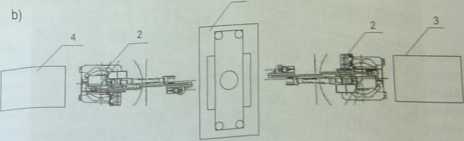
Konfiguracja stanowiska zrobotyzowanej obsługi prasy: a) z jednym robotem, b) z dwoma robotami; / - prasa, 2 - robot przegubowy, 5 - magazyn przygotówek, 4 - magazyn wydoczek
Wyszukiwarka
Podobne podstrony:
P1080303 Rysunek 8.13_ Algorytm projektowania chwytaków - ustalenie warunków począ
P1080383 Rysunek 13.42____________________ Konfiguracja linii pras z robotami przegubowymi W niektór
14(7) wyjście f . Rys. 15.8. Prasa hydrauliczna, czyli urządzenie służące do działania na przed
CZĘŚĆ OPISOWA 13 w latach 1959-2005). Takie zróżnicowanie w odniesieniu do roku hydrologicznego jest
Wspomnienie 13 klerykami zajęcia praktyczne z informatyki obejmujące wprowadzenie do obsługi kompute
Bezpieczeństwo transportowe na placu budowy 13.1 HMBBnraaamoB Jakie są dwa warunki wymagane do obsłu
P1080369 Po modernizacji Rysunek 13.15 ________ . Ł ... ____ Analiza
więcej podobnych podstron