28078 instalacje088

2. KONSTRUKCJA 1 WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 58
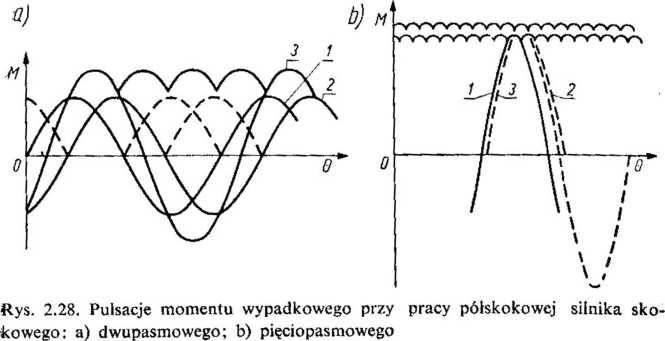



Rys. 2.29. Wykresy wektorowe momentów składowych silników skokowych (wg [9]): a) trój pasmowego; b) czteropasmowego; c) pięciopasmowego tych w punktach zwanych punktami równowagi momentu. Moment obrotowy potrzebny do przemieszczenia wirnika z punktu równowagi nazywa się momentem synchronizującym. Moment synchronizujący przeciwstawia się momentom zewnętrznym, dążącym do naruszenia położenia równowagi. Suma momentów zewnętrznych, wymagana do wyprowadzenia wirnika z położenia równowagi, nazywa się maksymalnym momentem synchronizującym.
Dwupasmowy, dwubiegunowy silnik skokowy ma 8 punktów równowagi, natomiast pięciopasmowy ma ich 60. Mając znacznie więcej punktów równowagi silniki pięciopasmowe mają znacznie mniejsze pul-sacje momentu i prędkości obrotowej niż dwupasmowe. Duża liczba punktów równowagi zapewnia korzystniejsze charakterystyki rezonansowe silników pięciopasmowych.
Wykresy wektorowe momentów składowych silników skokowych {trójpasmowego, czteropasmowego i pięciopasmowego) przedstawiono na rys. 2.29. Widoczne jest malenie pulsacji momentu wypadkowego ze wzrostem liczby pasm.
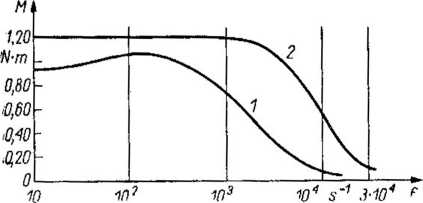
Rys. 2.30. Porównanie charakterystyk mechanicznych dwupasmowego (krzywa 1) i pięciopasmowego (krzywa 2) silnika skokowego
Na rysunku 2.30 zestawiono charakterystyki mechaniczne M — f(/) dwupasmowego silnika skokowego (krzywa 1) i pięciopasmowego (krzywa 2). Widoczne jest, że silnik pięciopasmowy ma większe momenty obrotowe i może osiągać większe częstotliwości.
2.6.3. Pięciopasmowe silniki skokowe
Właściwości pięciopasmowego silnika skokowego zależą od rodzaju zastosowanego układu sterowania, w tym również od rodzaju jego końcówki mocy.
Wyszukiwarka
Podobne podstrony:
instalacje072 2. KONSTRUKCJA l WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 28 Rys. 2.5. Rozkład momentu statyczne
35090 instalacje077 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 38 Rys. 2.14. Porównanie krzywyc
instalacje073 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 30 W przypadku struktury pokazanej na
24912 instalacje087 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH Rys. 2.27. Schemat połączeń i kr
87984 instalacje070 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 24 Elektryczne silniki skokowe R
instalacje071 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 26 Zasada działania silnika skokowego
więcej podobnych podstron