instalacje071
2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 26
Zasada działania silnika skokowego o wirniku reluktancyjnym została objaśniona w rozdz. 1.
Znane są dwa rodzaje reluktancyjnych silników skokowych: o jednym zębie wirnika na „biegun” stojana (rys. 2.2a) i o kilku zębach wirnika na „biegun” stojana (rys. 2.2b). Na rysunku 2.2 pokazano szkice ogólnie stosowanych wielopasmowych silników skokowych (na rys. 2.2a — trójpasmowego; na rys. 2.2b — czteropasmowego); aby nie zaciemniać rysunku pokazano tylko po jednym paśmie uzwojenia.
W przypadku przedstawionym na rys. 2.2a podziałki zębowe stojana i wirnika są różne, a w konstrukcji pokazanej na rys. 2.2b są sobie równe. Kiedy impuls jest doprowadzony do pasma /-/, wirnik ustawi się w położeniu najmniejszej reluktancji ($ = 0 — rys. 2.2b). Zęby wirnika naprzeciwko sąsiednich biegunów stojana są przesunięte względem siebie o 1/4 podziałki zębowej. Kiedy impuls zostanie doprowadzony do pasma 2, wirnik wykona jeden skok itd.
Wartość skoku silnika skokowego o wirniku reluktancyjnym przy komutacji symetrycznej określa się na podstawie wzoru
ar
360°
Zrm
gdzie:
Zr — liczba zębów wirnika; m — liczba pasm uzwojenia stojana.
W konstrukcji pokazanej na rys. 2.2b uzwojenie dwu przeciwległych biegunów stojana tworzy pasmo; układ taki jest nazywany symetrycznym. Możliwe jest też rozwiązanie niesymetryczne ~ wtedy całe uzwojenie jednego pasma jest umieszczone na jednym biegunie. W rozwiązaniu niesymetrycznym nadmiernie zużywają się łożyska, a praca jest hałaśliwa.
Rozpatrzone reluktancyjne silniki skokowe są silnikami jedno-segmentowymi. Lepsze właściwości ma rełuktancyjny silnik skokowy wielosegmentowy, co można uzasadnić następująco.
W przypadku zwyczajnego, jednosegmentowego silnika skokowego, w położeniu wirnika przedstawionym na rys. 2.3 — punkt A ma największą wartość energii magnetycznej W, punkt B zaś najmniejszą. Dla obu tych punktów moment statyczny jest równy zeru (krzywa M na rys. 2.3), przy czym punkt C — odpowiadający maksymalnej energii magnetycznej — jest stabilnym punktem zerowym, natomiast punkt D —
Rys. 2.3. Energia magnetyczna W i statyczny moment obrotowy M reluktancyjnego silnika skokowego
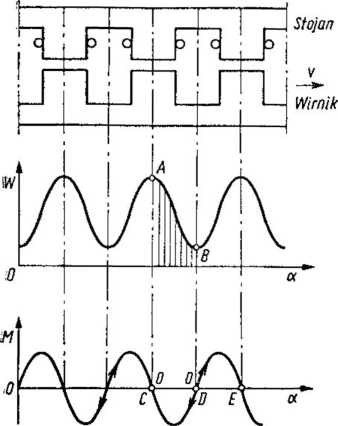
— odpowiadający minimalnej energii magnetycznej — niestabilnym punktem zerowym. Z niestabilnego punktu zerowego D wirnik może się przemieścić do punktu C lub E, a zatem może on opuścić skok, co jest niekorzystne. Tej niedogodności przeciwdziała stosowanie silnika wielosegmentowego.
Silnik trójsegmentowy (trójsekcyjny lub trój pak i eto wy) ma trzy przesunięte względem siebie, pakiety wirnika (rys. 2.4). Istnieją silniki wielosegmentowe o większej liczbie segmentów. Umożliwia to uzyskanie, przy kolejnym zasilaniu impulsami uzwojeń trzech (lub więcej) seg-
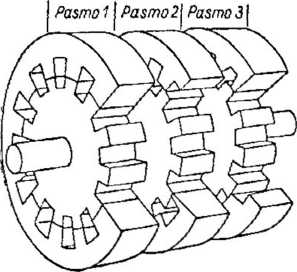
Rys. 2.4. Szkic budowy trójsegmentowe-go silnika skokowego
Wyszukiwarka
Podobne podstrony:
instalacje072 2. KONSTRUKCJA l WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 28 Rys. 2.5. Rozkład momentu statyczne
instalacje074 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 32 janie kilkupasmowe uzwojenie steruj
instalacje079 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 42 mieszką metali ziem rzadkich ma tec
instalacje089 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 60 Mogą być stosowane trzy rodzaje uk
instalacje090 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 62 Praca półskokowa w silnikach pięcio
instalacje091 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 64 że jedno z nich musi być łewoskrętn
instalacje073 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 30 W przypadku struktury pokazanej na
instalacje078 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 40 Ponieważ nHc ferrytów jest bardzo d
instalacje082 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 48 Silnik hybrydowy o magnesach trwały
instalacje092 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 66 Jeżeli jest zasilane pierwsze uzwoj
więcej podobnych podstron