41905 MaszynaW 13
30
2. Maszyna EW
wprowadzeniu stanu przerzutnika GOT wybranego (kodem selekcyjnym) obwodu wymiany do akumulatora. Dysponując rozkazem SOM (skok przy minusie akumulatora) można dokonać rozgałęzienia programu w zależności od stanu GOT. Inne rozwiązanie testu może polegać na zdefiniowaniu specjalnego rozkazu przeskoku. Jego działanie polega na pominięciu wykonania następnego rozkazu, gdy przerzutnik GOT=l;
3. wykorzystanie układu przerwań - funkcję testowania powierza się układowi przerwań, który przerywa aktualnie wykonywany program po przyjściu gotowości od UZ.
3. Opis symulatora
Wyrażenie „symulacja" oznacza zestaw działań związanych z konstruowaniem modeli systemów rzeczywistych i symulowania ich na komputerze. Symulator to model badanego obiektu (zrealizowany np. na komputerze) odzwierciedlający jego własności oraz efekty zmian zachodzące w nim lub w jego otoczeniu. Symulatorem jest np. program umożliwiający symulację działania projektowanej maszyny cyfrowej zrealizowany w komputerze istniejącym.
3.1. Podstawowe funkcje symulatora
3.1.1. Definiowanie rozkazów m.c.
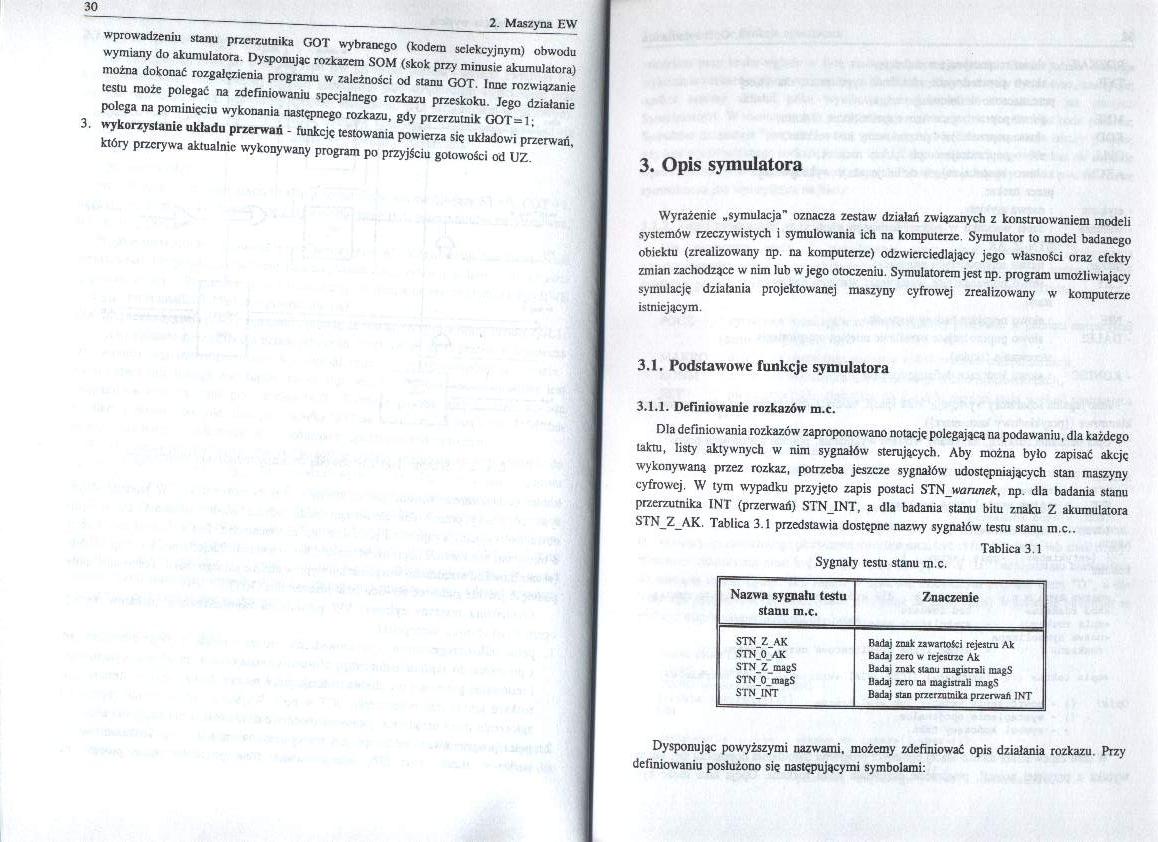
Dla definiowania rozkazów zaproponowano notację polegającą na podawaniu, dla każdego taktu, listy aktywnych w nim sygnałów sterujących. Aby można było zapisać akcję wykonywaną przez rozkaz, potrzeba jeszcze sygnałów udostępniających stan maszyny cyfrowej. W tym wypadku przyjęto zapis postaci STN warunek, np. dla badania stanu przerzutnika INT (przerwań) STNINT, a dla badania stanu bitu znaku Z akumulatora STNZAK. Tablica 3.1 przedstawia dostępne nazwy sygnałów testu stanu m.c..
Tablica 3.1
Sygnały testu stanu m.c.
|
Nazwa sygnału testu stanu m.c. |
Znaczenie |
|
STN Z AK STN-0 AK STN_Z magS STN 0 magS STN INT |
Badaj znak zawartości rejestru Ak Badaj zeto w rejestrze Ak Badaj znak stanu magistrali magS Badaj zero na magistrali magS Badaj stu prze rzutnika przerwań INT II |
Dysponując powyższymi nazwami, możemy zdefiniować opis działania rozkazu. Przy definiowaniu posłużono się następującymi symbolami:
Wyszukiwarka
Podobne podstrony:
bydgoszcz ©ETO Manifestacja organizowana Jeat w związku z wydarzeniami 13 grudnia 1981 roku I wprowa
Wizualizacja stanu maszyny Łatwość wprowa dzania danych Praca nocna PSZENICA _
MaszynaW 11 z. Maszyna EW z. Maszyna EW po*ioai obsługi
MaszynaW 12 2. Maszyna EW 28 _ 2.3.1. Opis układu wejścia-wyjścia Dla rzeczywistej
Opcjonalnie: Maszyny wirtualne. Wprowadzenie do translacji. Deklaracje i typy. Mec
18333 MaszynaW 10 2. Maszyna EW 2.2.1.2. Obsługa przerwania w cyklu rozkazowym dla liniowej organiza
Schowek04 3 Podstawowe zagadnienia eksploatacji maszyn i urządzeń1.1. Wprowadzenie
D j^. cje seryjną pod oznaczeniem Fokker y E.V. Seryjne maszyny, po wprowadzeniu na uzbrojenie, wyka
Tematyka wykładów z MASZYN ELEKTRYCZNYCH. 1. Wprowadzenie. 1.1.
W ROCZNICĘ WPROWADZENIA STANU WOJENNEGO iCO PAMIĘTAMY Z TAMTYCH DNI? Mroźny poranek 13 grudnia 1981
łuki0016 Rys. 13-30. Przykład konstrukcji przegubu toku dwuprzegubowego o rozpiętości 1=49,30 m
skanuj0011 (375) ę --ę0 = -0,10 rad , <p = 0. (D-13.30> Po podstawieniu waru
więcej podobnych podstron