69851 P1050567 (2)
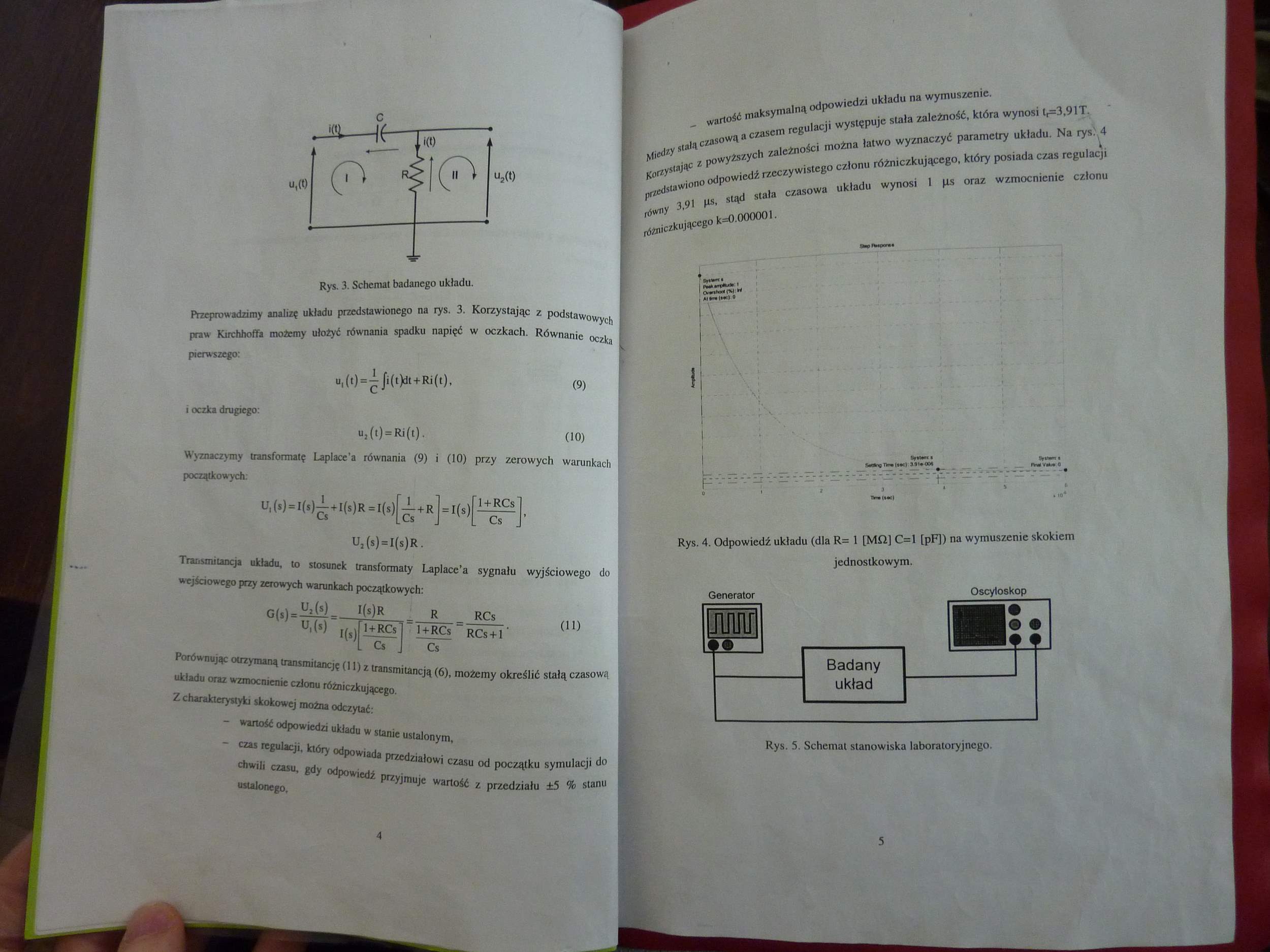
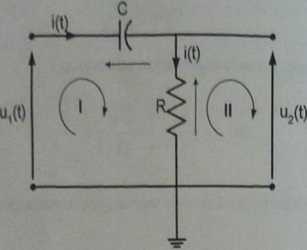
Rys, 3. Schemat badanego układu.
Przeprowadzimy analizę układu przedstawionego na rys. 3. Korzystając z podstawowych praw Kirchhoffi możemy ułożyć równania spadku napięć w oczkach. Równanie oczka pierwszego: i oczka drugiego:
u,(t)=Ri(t). (10)
Wyznaczymy transformatę Laplace’a równania (9) i (10) przy zerowych warunkach początkowych:
= l(s]
—+R Cs
1+RCs
Cs
Uj(®)=I(s)R •
Traiismitancja układu, to stosunek transformaty Laplace’a sygnału wyjściowego do wejściowego przy zerowych warunkach początkowych:
R
RCs
1+RCs
Cs
1+RCs RCs+l' Cs
Porównując otrzymaną transmitancję (11) z transmitancją (6), możemy określić stałą czasową układu oraz wzmocnienie członu różniczkującego.
Z charakterystyki skokowej można odczytać:
- wartość odpowiedzi układu w stanie ustalonym,
- czas regulacji, który odpowiada przedziałowi czasu od początku symulacji do chwili czasu, gdy odpowiedź przyjmuje wartość z przedziału ±5 % stanu ustalonego.
- wartość maksymalną odpowiedzi układu na wymuszenie, f Miedzy stalą czasową a czasem regulacji występuje stała zależność, która wynosi t,=3,91T. s Korzystając z powyższych zależności można łatwo wyznaczyć parametry układu. Na rys). 4 | przedstawiono odpowiedź rzeczywistego członu różniczkującego, który posiada czas regulacji I równy 3,91 |is, stąd stała czasowa układu wynosi 1 ps oraz wzmocnienie członu w różniczkującego k=0.000001.
Saapn»spona«
%«-• ftNkBflpRudt; t ' Owłiłoot |%): hi
A!*r»(we);0
k

Rys. 4. Odpowiedź układu (dla R= 1 [MO] C=1 [pF]) na wymuszenie skokiem jednostkowym.
|
Badany |
wmw |
|
układ | |
|
_ i | |
Generator
Oscyloskop

Rys. S. Schemat stanowiska laboratoryjnego.
Wyszukiwarka
Podobne podstrony:
Image463 Wykorzystując schemat ideowy układu przedstawionego na rys. 4.566 i schemat ideowy układu p
Zdjęcie090 (5) Ola tego przypadku schemat blokowy układu przedstawiony na rys 5 można przedstawić w
61014 Zdjęcie0155 (6) Dla tego przypadku schemat blokowy układu przedstawiony na rys. 4b można przed
Zdjęcie090 (5) Ola tego przypadku schemat blokowy układu przedstawiony na rys 5 można przedstawić w
P1050568 (2) Rys. 6. Schemat badanego układu. Proszę połączyć układ według schematu przedstawionego
wolańczyk k H V y r(RHa 4> t t<v 1 ^ T «-* Rys. 7. Schemat badanego układu kogeneracyjnego z u
Instytut Maszyn i Urządzeń Energetycznych POLITECHNIKA ŚLĄSKA_OBLICZENIA SCHEMAT BADANEGO UKŁADU
Dla układu przedstawionego na rys. 1 przeprowadzono pomiary, a wyniki zaprezentowano na rys. 2. Prze
CCF20140608�004 KONOTACJA. SCHEMATY ZDANIOWE (2) Ćwiczenie 1. Przeprowadź analizę podanych wypowiedz
Image098 r Bramka LUB-NIE (NOR) oraz LUB (OR) Schemat elektryczny bramki LUB-NIE — 02 przedstawiono
Image229 Schemat logiczny dekady liczącej w kodzie 8421 przedstawiono na rys. 4.230. Maksymalna częs
Image424 Symbol graficzny przerzutnika 123 wraz z tablicą opisującą działanie układu przedstawiono n
img077 77 Schemat analizatora gazu przedstawiono na rysunku 24 j Jeat to nie-arćwnoważony mostek pry
więcej podobnych podstron