5
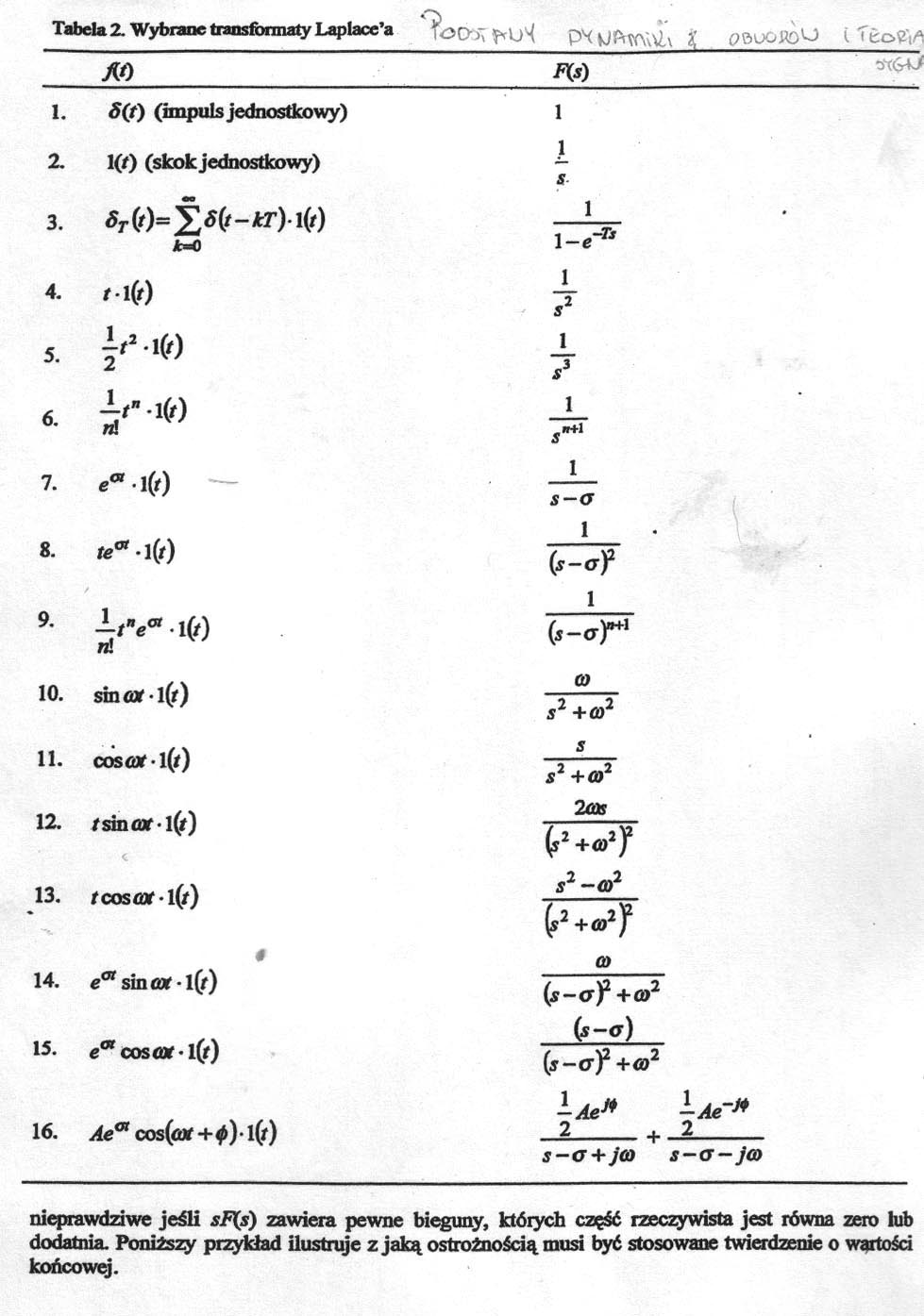
Tabela 2. Wybrane transformaty Laplace’a PH »JPryr\\\Lv a OSUOUOO i Teogj/0;
M
1. S(t) (impuls jednostkowy)
2. l(f) (skokjednostkowy)
3. ST(t)=f,6(t-kT)l(t)
Jt=0
m
1
l
s
1-e
-Ts
4. t • l(r)
.ir+1
7. eal (t)
8. te* l(t)
l
s-o
1
9- Lfe* l(t)
n!
10. sino*-l(r)
11. coso#l(r)
12. /sincurl(t)
13. /COSG*l(jf)
4
14. e® sin ax -l(f)
15. e^costuf-l(t)
16. Ae* cos(<ur+^)- l(f)
(s-af
1
s2 +co2
s2 +a>2
2cos
s2-<o2
+oo2Y
co
(s-of +a>2 (s-o)
(s-of +co2
s-o+jco s-a-jco
nieprawdziwe jeśli sF(s) zawiera pewne bieguny, których część rzeczywista jest równa zero lub dodatnia. Poniższy przykład ilustruje z jaką ostrożnością musi być stosowane twierdzenie o wartości końcowej.
Wyszukiwarka
Podobne podstrony:
Tabela 2. Wybrane transformaty Laplace’a PH »JPryr\Lv a osuouoO i Teogj/0; Tabela 2. Wybrane transfo
9oer> • cK W frwu; t>o Tabela 2. Wybrane transformaty Laplace’a
Automaty tablice (2) Teoria sterowania Rachunek operatorowy Tabela 2. Wybrane transformaty
9 PRZEKSZTAŁCENIE LAPLACE’a str. 127 Tabela 8.1 Transformaty Laplace’a wybranych
PRZEKSZTAŁCENIE LAPLACE’a str. Tabela 8.1 Transformaty Laplace’a wybranych
PRZEKSZTAŁCENIE LAPLACE’a str. Tabela 8.1 Transformaty Laplace’a wybranych
Tabela transformat Laplace a x(t) X(s) x(t) x(s) S(t) 1 (l-e-f-KO n s ■ (s + l)- 0+ 2).. .(s +
Tabela transformat Laplace a x(t) X(s) x(t) x(s) S(t) 1 (l-e-f-KO n s ■ (s + l)- 0+ 2).. .(s +
img058 2 Transformaty Laplace’a wybranych funkcji elementarnych: Oryginał /(/,) Transformata
skanuj0402 4. Tabela 1. WYBRANE PARAMETRY. SYMBOLE I JEDNOSTKI GEOTECHNICZNE WG PN-86/B-02480 I PN-E
Tabela 1.1. Wybrane definicje mechatroniki w porządku chronologicznym Integracja naturalnie różnych
Transformacja Laplace a w7 Wzór7: /(?) = teat ARer > Rea /**($■) = l{ f(f)}= f f (?)e 5tdt = (&qu
Transformaty Laplace a x(t) X(t) x(t) X(t) S(t) 1 (l-e-f-KO n s ■ (s + l)- 0+ 2).. .(s +
więcej podobnych podstron