252 (9)
W obu tych przypadkach równania obserwacyjne dia kąta aicp są identyczne i mają postać
aLCł> - ACP ~ acl = kcp + Cc ~U<cl + Cc)~ Ka> - Ka =
Yp ~YC Y, - Yc
— arctg — —— arctg — -— —-
X p-X c XL-XC
Na tej podstawie można sformułować następujące nieliniowe równanie poprawki:
»b
a,ri>+ l'„
Yr
yl~yc
= arctg--------— arctg
XP-XC X i - X c
lLCI> r vaLC!>
Natomiast jego liniowe pi'zybłiżenie można zapisać w postaci
o
, da d v + —
vo vr> '“ 7c
•ć * arc‘S -x—~-xT ~ arclg VŚ~T - «.
XI-Xc
(,LCf
Wyznaczając odpowiednie pochodne, uzyskujemy
**tcp _ 3
3^ 3*,/ hXL~Xc dl
CL
CT
d&LCP — 3
ar,;
CL
&X,
CL
dr,
CL
__CP
dCP
arctg
-arctg
|
Yp “ Yc |
_ *xa |
|
X p~Xc |
dCP |
|
. Yp - Yc |
d |
|
’xP-xc |
d,rc |
|
Yp - Yc |
d |
|
Xp~Xc |
arc“ |
r, — rc ayc/> Ar,
arctg ——.....—— = —~-
XL~XC Ąp d~
Yl-YC XL-Xc
cl
i
ĆL
JCP , &Xcl
j2 .2
dCP dCL
Przykłady
Przykład 5.1.1
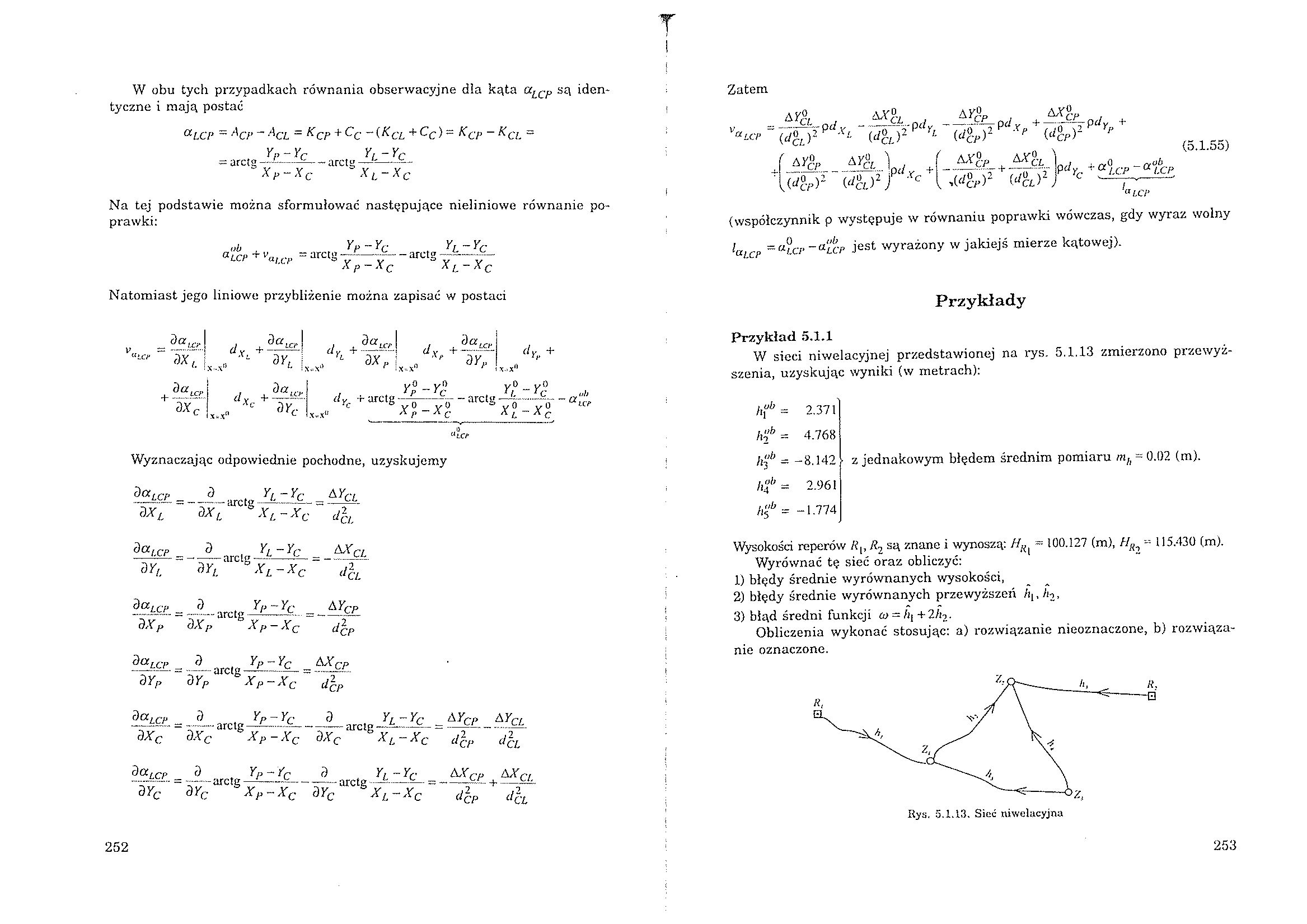
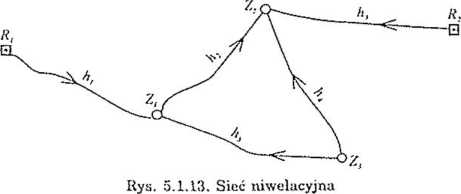
W sieci niwelacyjnej przedstawionej na rys. 5.1.13 zmierzono przewyższenia, uzyskując wyniki (w metrach):
|
hf = |
2.371 |
|
hf = |
4.768 |
|
hf = |
-8.142 |
|
hf = |
2.961 |
|
i ob h5 = |
-1.774 |
Zatem
AY&
V’aiC/J (^)yP 'Y/- (4J
____________________________,
^cz.)
r;v i , f ax9-P ax£, i n
__ A-yo
,CP a LCP
*uLCP
(współczynnik p występuje w równaniu poprawki wówczas, gdy wyraz wolny lalCp ~ a<ixi‘ “aLCP jest wyrażony w jakiejś mierze kątowej).
z jednakowym błędem średnim pomiaru mh - 0.02 (m).
Wysokości reperów R{, R-, są znane i wynoszą: HR( ~ 100.127 (m), « 115.430 (m).
Wyrównać tę sieć oraz obliczyć:
1) błędy średnie wyrównanych wysokości,
2) błędy średnie wyrównanych przewyższeń h^łin,
3) błąd średni funkcji a>-h\ + 2h2.
Obliczenia wykonać stosując: a) rozwiązanie nieoznaczone, b) rozwiązanie oznaczone.
253
Wyszukiwarka
Podobne podstrony:
skanuj0060 (15) 6R W obu tych przypadkach rozmiary popytu mierzy się w jednostkach fizycznych. Zarów
skanuj2 10 - ...=6 (w każdym z tych przypadków równanie jest warunkiem na szukaną) • &nb
32 W obu tych przypadkach rozmiary popytu mierz) się w jednostkach fizycznych. Zarówno popyt indywi
CCF20090212�017 pod kłodę drewna. A co najważniejsze, w obu tych przypadkach mogą zaistnieć inne zda
MASZYNA SYNCHRONICZNA JAWNOBIEGUNOWA Równania wyjściowe stojana (3-fazowe) i wirnika są identyczne j
Kąt poziomy W formie symbolicznej, równanie obserwacji kąta poziomego wyrażone przez współrzędne trz
Badanie niestabilizowanych /asilac/y sieciowych Rys. 6 Dla obu przypadków dokonać obserwacji przebie
252 2 252 5. Pielęgnacja rąK Rola kosmetyczki ogranicza się w tych przypadkach do udzielenia porad i
skanuj0011 (280) Wszyscy autorzy podkreślają tępotę tych osobników. Naocznym obserwatorom trudno był
f (9) 184 J. KRZYNÓWEK. [10] W obu analizowanych przypadkach kryteriu n rozstrzygnięcia jest po
img018 (53) miejsko-wiejskich widać wyraźną dodatnią korelację między skalą działań obu typów (a w p
dzeniami powikłanymi, są złamania wybuchowe. W tych przypadkach nadwyprost kręgosłupa może doprowadz
img031 Oznaczamy prądy: /g. /9, / PRK NRK/8 + /9 = 2 20 • /8 - 7,5 • /9 + 60 = 0 Z tych dwóch równań
Układ równań obserwacyjnych (w postaci
więcej podobnych podstron