29 (286)
30 ZAKŁADY MECHANICZNE „TARNÓW”
lP-
11 Sprawdzenie dokładności tokarki narzędziowej
o średnicy przelotu nad łożem do 360 mm wg PN-57/M-55651
Rodzaj
pomiaru
Szkic
Przyrządy
pomia
rowe
Odchyłka dopuszczalna w mm
Odchyłka rzeczywista
Sposób
pomiaru
1 I
Bicie kła wrzecien-nika.
6
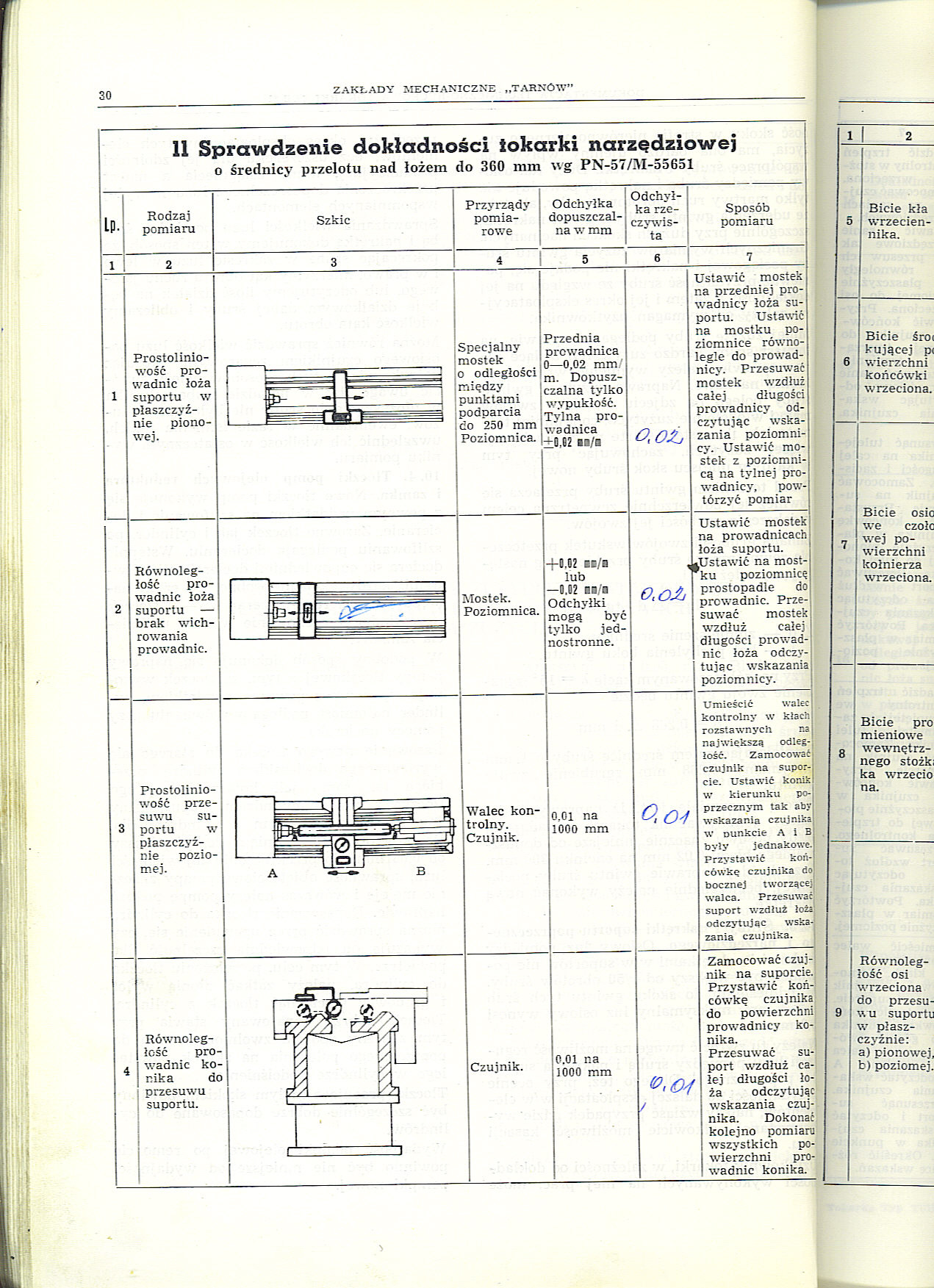
Prostolinio-wość prowadnic łoża suportu w płaszczyźnie pionowej.
Specjalny mostek o odległości między punktami podparcia do 250 mm Poziomnica.
Przednia prowadnica 0—0,02 mm/ m. Dopuszczalna tylko wypukłość. Tylna prowadnica 0,62 B0/B
Ustawić mostek na przedniej prowadnicy łoża suportu. Ustawić na mostku po-zicmnice równolegle do prowadnicy. Przesuwać mostek wzdłuż całej długości prowadnicy odczytując wskazania poziomni-cy. Ustawić mostek z pozicmni-cą na tylnej prowadnicy, powtórzyć pomiar
Bicie śroi kującej pi wierzchni końcówki wrzeciona.
Ustawić mostek na prowadnicach łoża suoortu.
Równoległość prowadnic łoża suportu — brak wichrowania prowadnic.
|
)b-f |
—--- — | |
|
j)- | ||
|
---. ■ = |
Mostek.
Poziomnica.
1.02 sc/o lub —0.02 ■■/■ Odchyłki mogą być tylko jednostronne.
LUstawić na most-
ku poziomnicę prostopadle do prowadnic. Przesuwać mostek wzdłuż całej długości prowadnic łoża odczytując wskazania pozicmnicy.
Bicie osio we czoło wej powierzchni kołnierza wrzeciona.
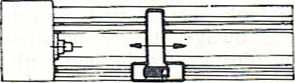
Prostolinio-wość przesuwu su
portu w płaszczyźnie poziomej.
Walec kontrolny. Czujnik.
0,01 na 1000 mm
Umieścić walec kontrolny w kiach rozstawnych na największą odległość. Zamocować czujnik na supor-cie. Ustawić konik w kierunku poprzecznym tak aby wskazania czujnika w ounkcie A i 3 były jednakowe. Przystawić końcówkę czujnika do bocznej tworzącej walca. Przesuwać suport wzdłuż łoża; odczytując wska-j zania czujnika.
Bicie pro mieniowe wewnętrznego stożki ka wrzecio na.
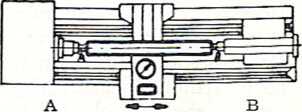
Równoległość pro
wadnic ko nika do przesuwu suportu.
Czujnik.
0.01 na 1000 mm
Zamocować czujnik na suporcie. Przystawić końcówkę czujnika do powierzchni prowadnicy konika.
Przesuwać suport wzdłuż całej długości łoża odczytując wskazania czujnika. Dokonać kolejno pomiaru wszystkich powierzchni prowadnic konika.
Wyszukiwarka
Podobne podstrony:
7 (834) 8 ZAKŁADY MECHANICZNE „TARNÓW 1.3. BEZPIECZEŃSTWO I HIGIENA PRACY 1. 3.1. WSTĘP Tokarka powi
23 (401) r 24 ZAKŁADY MECHANICZNE „TARNÓW” cej obciążonych części i elementów tokarki, gdy dopuszcza
5 (995) 6 ZAKŁADY MECHANICZNE „TARNÓW” Skrzynka suportowa posiada specjalny mechanizm wyłączenia pos
27 (318) 28 ZAKŁADY MECHANICZNE „TARNÓW” 28 ZAKŁADY MECHANICZNE „TARNÓW” 1 2 3 skrzyni
31 (267) r 32 ZAKŁADY MECHANICZNE „TARNÓW 10 Równoległość przesuwu sań narzędziowych do osi
9 (685) 10 ZAKŁADY MECHANICZNE „TARNÓW 1. S. WŁASCP I SMAKI 1.7. INSTRUKCJA SMAROWANIA DO RYS.
82465 polityka rodowiskowa 110411 71521352 MOTTO:ZAKŁADY MECHANICZNE „TARNÓW” S.A. "Nla odziedz
33 (277) 34 ZAKŁADY MECHANICZNE „TARNÓW 34 ZAKŁADY MECHANICZNE „TARNÓW 18Sprawdzenie dokładności
35 (210) 36 ZAKŁADY MECHANICZNE „TARNÓW” Ili 2 3
25 (362) 26 ZAKŁADY MECHANICZNE „TARNÓW Warunki skrawania: n = 560 obr/min. p - 0.5 mm/obr. g =
DSC00033 (29) KATEDRA BUDOWNICTWA I GEODEZJI Zakład Mechaniki i Konstrukcji Budowlanych Wydział
99 W bibliotece zakładowej przybyło 49 pozycji inwentarza: 30 książek i 19 czasopism (8 polskich i 1
29 Aktualne Problemy Biomechaniki, nr 4/2010 Stefan BUCKO, Marcin WIKLACZ, Zakład Mechaniki Doświadc
7 (1095) Lokalizacja genu: lp 11-13 Produkt genu: TyP I > 30 - hydroksysteroidowa dehydrogenaza w
29. System PRINTAII oparty na minikomputerze PDP-11/34 przeznaczony do rozpoznawania odcisków palców
więcej podobnych podstron