300 (10)
4) Błąd średni wyrównanej odległości d2 Biorąc pod uwagę, że
F- =03.-[0.764 0.645)
‘h
uzyskujemy
m:h = '»<)/F]’(A7'PA)“lF(?:? =»r01/a3.(ATPAr,aŁ -0.03 on)
5) Błąd średni sumy wyrównanych kątów « i />’
Skoro -v = a + /(, więc
|
ds |
da |
* ' | ||
|
dX2\ |
2i |
dX 2i | ||
|
ds |
da |
3/J | ||
|
dY2l |
d Y2 1 |
dY2X |
: U4, -ł- a{.
F, =
105.921
62.838 •97.351
15.169
8.570
178.007
a następnie
ms = m(} PA) 1 Ff * 5'
Przykład 5.1.6
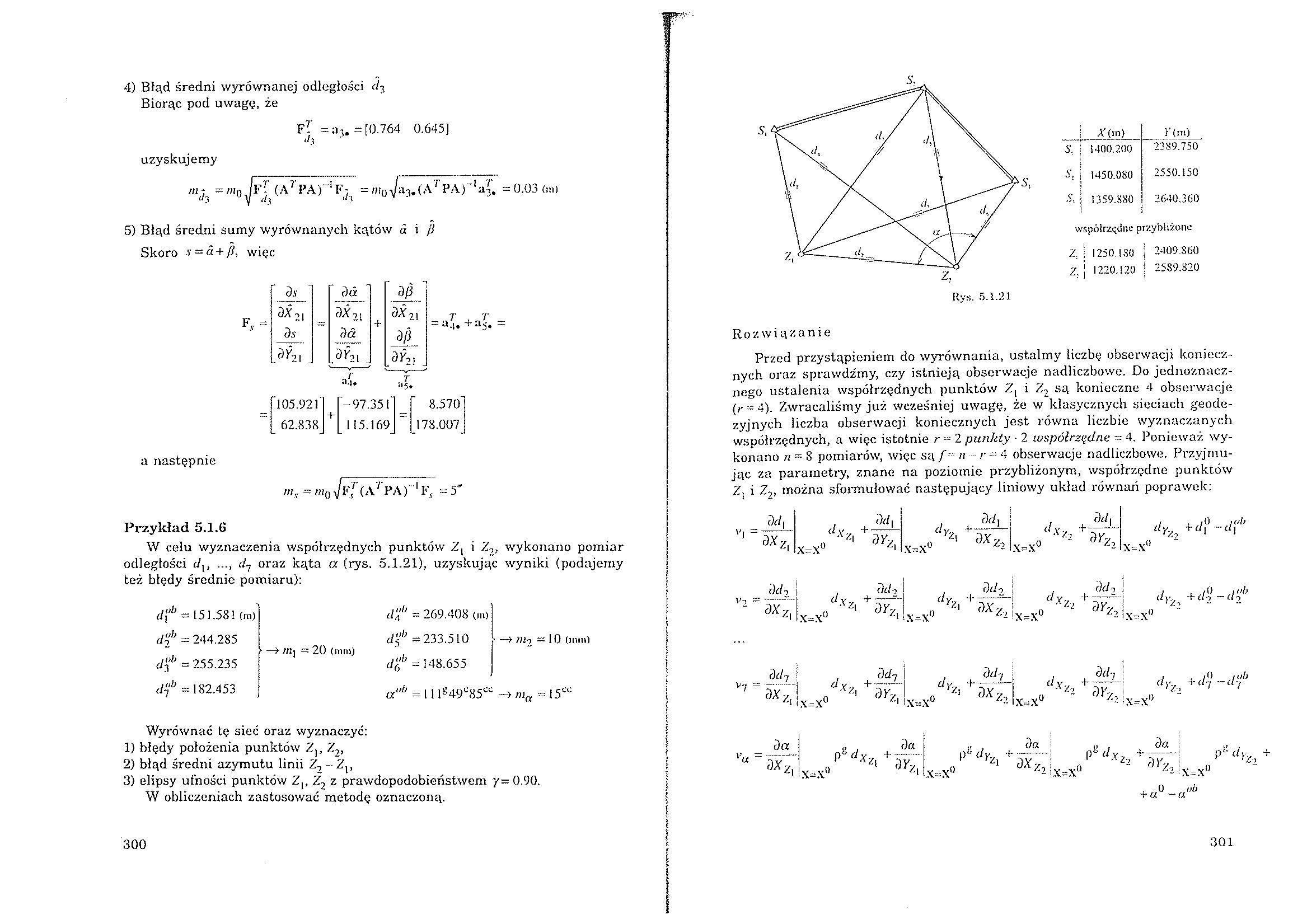
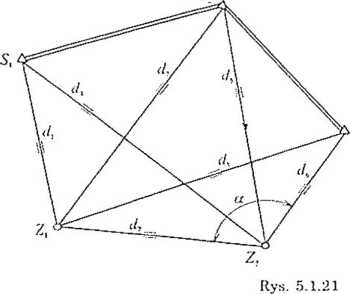
W celu wyznaczenia współrzędnych punktów Z( i Z-,, wykonano pomiar odległości dx, d1 oraz kąta a (rys. 5.1.21), uzyskując wyniki (podajemy też błędy średnie pomiaru):
|
df |
= 151.581 (in) |
df |
= 269.408 on) | |
|
df |
= 244.285 |
■—>/«] = 20 (mm) |
df |
= 233.510 |
|
df |
= 255.235 |
= 148.655 | ||
|
df |
= 182.453 |
aob |
=11lg49c85cc |
Wyrównać tę sieć oraz wyznaczyć:
1) błędy położenia punktów Z,, Z7,
2) błąd średni azymutu linii Z7-Zj,
3) elipsy ufności punktów Z(, Z? z prawdopodobieństwem y— 0.90.
W obliczeniach zastosować metodę oznaczoną.
A'frn)
>'( m)
S. | 1400.200 | 2389.750 ■V. I 1450.080 | 2550.150
•5\ | 1359.S80 ! 2640,360
• i
współrzędne przybliżone
Z | 1250.180 | 2409.860 Z. i 1220.120 j 2589.820
Rozwiązanie
Przed przystąpieniem do wyrównania, ustalmy liczbę obserwacji koniecznych oraz sprawdźmy, czy istnieją obserwacje nadliczbowe. Do jednoznacznego ustalenia współrzędnych punktów Z{ i Z-, są konieczne 4 obserwacje (/• - 4). Zwracaliśmy już wcześniej uwagę, że w klasycznych sieciach geode-zyjnych liczba obserwacji koniecznych jest równa liczbie wyznaczanych współrzędnych, a więc istotnie r 2 punkty ■ 2 współrzędne ~ 4. Ponieważ wykonano n - 8 pomiarów, więc są f n -r ~- 4 obserwacje nadliczbowe. Przyjmując za parametry, znane na poziomie przybliżonym, współrzędne punktów Z, i Z,, można sformułować następujący liniowy układ równań poprawek:
|
drf, |
x=x° |
ddi |
x=x“ |
dd] |
rf**, x=x° ‘ |
3ć/i |
|
XI |
3*2, |
3>z2 | ||||
|
dd2 , , , |
^Z, x.x° |
r)dn 3rz, |
ddo X |
£/*z, x=x° |
ddn X: | |
|
dd7 v7 = -...... |
d*z> X--X(l |
ód-j H-------— 3rz, |
X./"1 |
dd7 ł«z. |
X-X° " |
-b —------ |
x=x
dy-/.-y
da
X^X’J
da
Z>
X-XłJ
+ «0-a,#6
301
Wyszukiwarka
Podobne podstrony:
gdzie umowną średnicę Du oblicza się biorąc pod uwagę część powierzchni wytłoczki zaznaczoną
spektroskopia043 86 niekrystalicznym stopem krzemu i GaAs. Jest to zrozumiałe, biorąc pod uwagę, że
CCI20090225�003 Katalog Typowych Konstrukcji Nawierzchni - 1997 Biorąc pod uwagę, że zniszczenia naw
Do tego samego wniosku dochodzi się, biorąc pod uwagę, że w stanie rezonansu susceptancja B dwójnika
Do tego samego wniosku dochodzi się, biorąc pod uwagę, że w stanie rezonansu susceptancja B dwójnika
nik inflacjiII! Biorąc pod uwagę, że specjalizacja z zasady dotyczy przede wszystkim pracujących w s
31788 skanuj0111 (11) z tym, że podstawowym elementem mechanizmów śrubowych jest gwint oraz biorąc p
Do tego samego wniosku dochodzi się, biorąc pod uwagę, że w stanie rezonansu susceptancja B dwójnika
amerykański przychodzi go znieważyć, zupełnie nie biorąc pod uwagę, że jest to nasz rząd najbardziej
więcej podobnych podstron