326 (8)
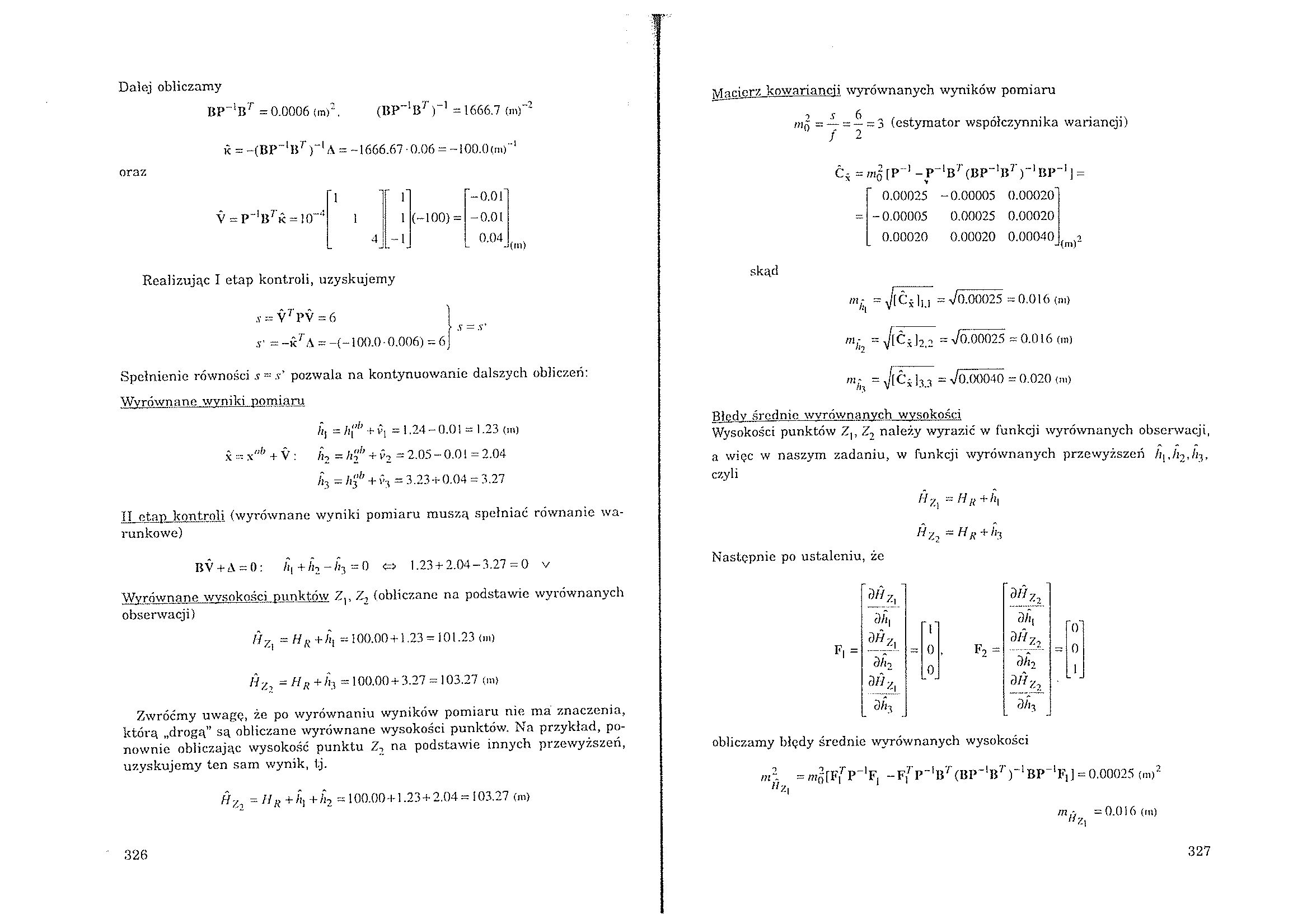
Dalej obliczamy
BP~‘Br =0.0006 <m)\ (IłP“1Br)“1 =1666.7 <mf2
k = _(Bp-,Br)“lA = -1666.67 0.06 = -100.0(n.f1
oraz
|
'l |
f |
-o.o r | ||
|
V = P“!B7 k = 10~4 |
1 4 |
1 -1 |
(-100) = |
r l P O ,2 2 |
Realizując I etap kontroli, uzyskujemy x = V7 PV = 6
> .v = r
.r = -k1A = 100.0 - 0.006) = 6 J
Spełnienie równości s~s' pozwala na kontynuowanie dalszych obliczeń: Wyrównane wyniki nomiaru
//, = h[,b + v, = l .24 - 0.01 = 1.23 (m) x = x,,b + V : h2 = hf + v2 = 2.05 - 0,0! = 2.04
% = tif + v3 = 3.23-1-0.04 = 3.27
H etap kontroli (wyrównane wyniki pomiaru muszą spełniać równanie warunkowe)
BV + A = 0 : /i, + h2 - /?3 = 0 <=> 1.23+2.04-3.27=0 v
Wyrównane wysokości punktów Z,, Z, (obliczane na podstawie wyrównanych obserwacji)
Uyx = Hr +ht =100.00 + 1.23 = 101.23 o»)
fi= Hr + /j3 = 100.00 + 3.27 = 103.27 (m>
Zwróćmy uwagę, że po wyrównaniu wyników pomiaru nie ma znaczenia, którą „drogą” są obliczane wyrównane wysokości punktów. Na przykład, ponownie obliczając wysokość punktu Z? na podstawie innych przewyższeń, uzyskujemy ten sam wynik, tj.
H-/yt = HR+h] + h2 = 100.00 + 1.23 + 2.04= 103.27 (m)
Macierz kowariancji wyrównanych wyników pomiaru
'«ó
v 6
— = —= 3 (estymator współczynnika wariancji)
/ 2
0.00025
0.00005
0.00020
-0.00005 0.00020 0.00025 0.00020 0.00020 0.00040
skąd
(ni)~
|
tn.- —■ k |
\Z(Ćxl,j =70.00025 =0.016 (m) |
|
m)t2 ~ 1 |
J[Ck. 12,2 = 7o.00025 = 0.016 (rn) |
|
'% = 1 |
J[Ci I3 3 = 7000040 = 0.020 <m) |
Błedv średnic wyrównanych wysokości
Wysokości punktów Z,, Z9 należy wyrazić w funkcji wyrównanych obserwacji,
a więc w naszym zadaniu, w funkcji wyrównanych przewyższeń /jj,/i2, /J3, czyli
flZ] =
HZ2=HR+h:i
Następnie po ustaleniu, że
|
#Z| |
3 H 2-> | |||
|
<)h\ |
3/j( | |||
|
ijs’ |
1 0 0 |
Ij1 — |
^2?_ | |
|
3/h |
, V2 — |
3/zo 3^22 | ||
|
3 |
3A3 |
obliczamy błędy średnie wyrównanych wysokości

= P~'Fj -F,7'p“,Br(BP”,B7*)‘1BP",P|] = 0.00025 (m)2
m.j =0.016 (m) H*\
327
Wyszukiwarka
Podobne podstrony:
Scan10089 *) współczynnik przesunięcia zarysu x Rys. 5.10c. Współczynnik obliczeniowy bp zęba na zła
(DCDGD©GD©GDGDGD®GD yr [czytaj dalej: Oblicza terroryzmu]Charakterystyka publikacji W oddanej w
©CDGD©GD©GDGDGD(5o)® ■w’ [czytaj dalej: Oblicza terroryzmu...)SPIS TREŚCI » Tomasz Bąk,
348 (8) oraz dalej dx = )-1 A^1 Ar(BP"lBr)“1 A = -<A7PA)~!ATPa
IMG!85 Obliczenie pala powiefłohni prze Urój u F .- F* *Ib- b» 2a • b‘2(«i hl. b♦1(1,5p
Łp1x=o=>-s1 2j+s2 --o £Piy=0=>S
skanuj0022 33. Obliczenie przepompowni.3.1. Maksymalny dopływ wody do studzienki S1. Osi r Qlmax ł Q
s2 zad6 s1 Dla płaskiej, statycznie niewyzlaczalnej kratownicy obliczyć wartości przemieszczeń węzło
bp ckrok3 Backpiopagalion - wsteczna piopagacia błędów H0E3 Ucznenie sieci • BACKPROPAGATION OBLI
326 (21) 326 9. Obliczanie obwodu magnetycznego maszyn prądu przemienny — obciążen
61310 Radosław Grzymkowski MATEMATYKA Zadania I Odpowiedzi Strona26 Liczby Zespolone 326 326 2
25020 skan0075 78 Termodynamika chemiczna h Rys. 3.13. Obliczanie z/S1, metodą trapezów - obszary ca
S7300491 --O.OOzjU nr* (7iM cm- Pole przekroju zbrojenia rozciąganego jest tu o olc. 4% wię^Bp od ob
DSC03888 Korzystając z formuły, dla transakcji A, B, C i D obliczono dalej stopę kapitalizacji dla E
ZADANIE-ł: (Bp) Zbadaj Omenie ekstremów lokalnych funkcji f{x*y)~ ** ~9xy+y*
więcej podobnych podstron