33 (317)
Niekonwencjonalne podwozia pojazdów gąsienicowych
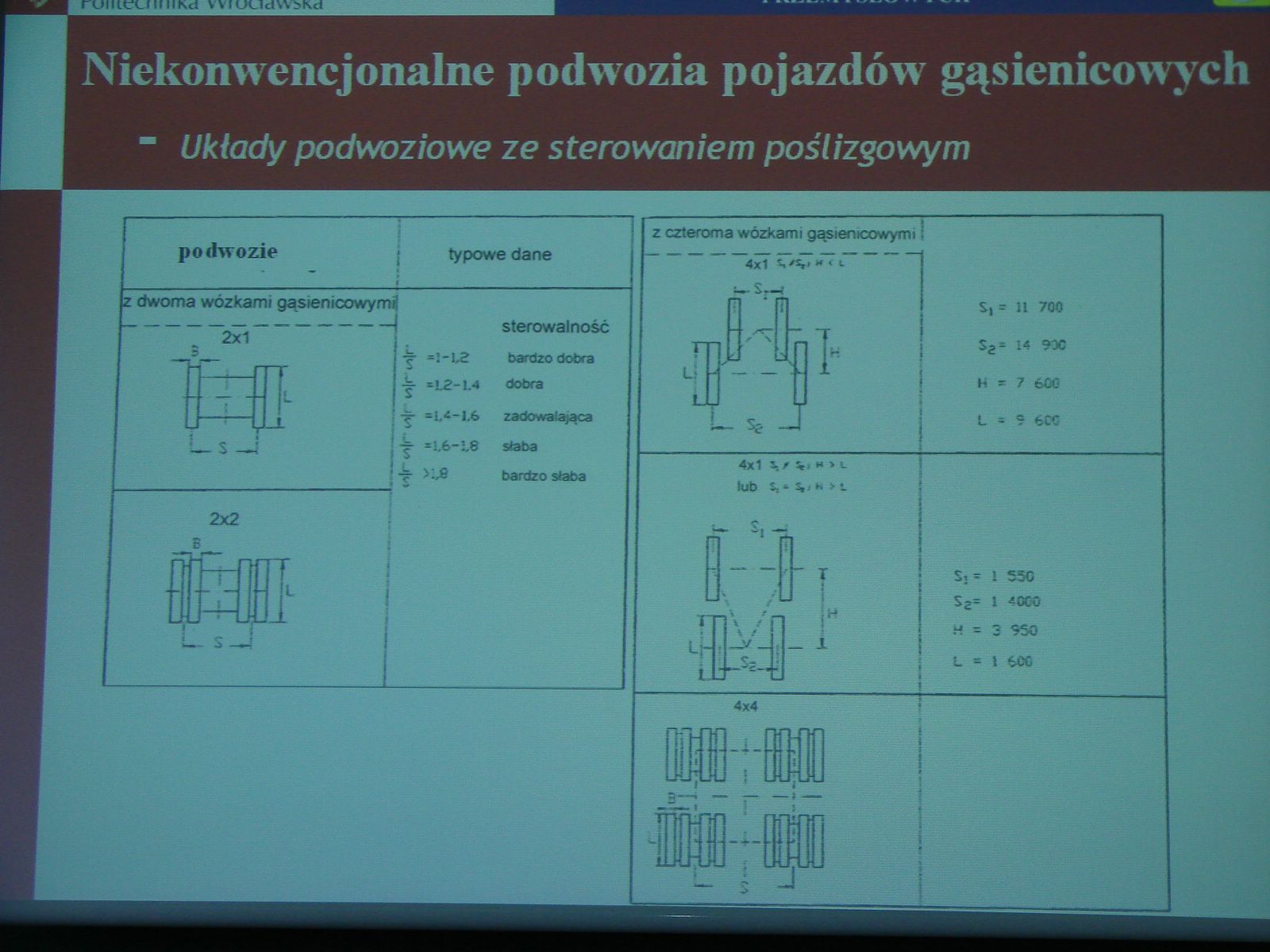
“ Układy podwoziowe ze sterowaniem poślizgowym
|
sterowalność | |
|
*1-12 |
bardzo dobra |
|
*L2-L4 |
dobra |
|
»L*-I.6 |
zadowatąąca |
|
*16-18 |
słaba |
|
>'Jd |
bardzo słaba |
2x2
6
|
r-L |
■ | ||
|
- |
L |
- | |
|
Jt |
LHH |
^*1 |
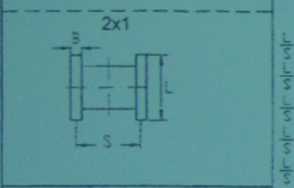
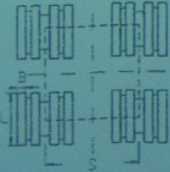
z czteroma wózkami gąsienicowymi I
|
L; Ł |
4x1 s. /r f \ % - |
1 ■' 1 !łf _■■1—i |
Sj = U 700 S2= 14 900 N * 7 600 L * 9 600 | |
|
4x1 */*»■** | ||||
|
lub S= |
V* >Ł | |||
|
j** |
*1 -3 | |||
|
— |
- T |
S;= 1 550 | ||
|
S2= 1 4000 | ||||
|
H | ||||
|
\ / |
H = 3 950 | |||
|
lS“ |
_y-. |
_ 1 | ||
|
c* ■ |
L = 1 60C | |||
|
t | ||||
|
4x4 | ||||
Wyszukiwarka
Podobne podstrony:
DSC00003 (20) Niekonwencjonalne podwozia pojazdów gąsienicowych“Napęd hybrydowy 1
68 (113) Niekonwencjonalne podwozia pojazdów gąsienicowych “ Napęd rozproszony Politechnika
29 (333) ZAKŁAD INŻYNIERII MASZYN ROBOCZYCH I POJAZDÓW J _ _ _ _ PRZE WYSŁÓW ACH_Niekonwencjonalne p
35 (248) UKŁAD INŻYNIERII MASZYN ROBOCZYCH I POJAZDÓW PRZEMYSŁOWYCH Niekonwencjonalne podwozia pojaz
Instrukcja obslugi COLT CZ5 33 I t r. . - aby podczas holowania pojazdy poniszaly się z a**; j ptgd
I miejsce: Gabriel Mura - Modelowanie dynamiki układu zawieszenia pojazdu gąsienicowego PT-91 • II m
Szybkobieżne Pojazdy Gąsienicowe (16) nr 2, 2002 Alicja ZIELIŃSKAANALIZA WYTRZYMAŁOŚCI WYSIĘGNIKA
CENTWOM ZAAWANSOWANYCH TECHNO BEZPIECZEŃSTWA I OBRONNOŚCI PIERWSZY POL3I POJAZD GĄSIENIC! O
Szybkobieżne Pojazdy Gąsienicowe (21) nr 1, 2005 Dariusz TYBIŃKOWSKI Arkadiusz KAZURACHARAKTERYSTYKA
61 (130) LYNIERII MASZYN ROBOCZYCH I PRZEMYSŁOWYCHa pojazdów gąsienicowych yjnym zawieszeniem rolek
Szybkobieżne Pojazdy Gąsienicowe (27) nr 1,2011 Gabriel KOST Andrzej NIERYCHLOKMODELOWANIE NAPĘDU
Szybkobieżne Pojazdy Gąsienicowe (38) nr 3, 2015 Arkadiusz MĘŻYK Wojciech KLEIN Krzysztof
Pojazd gąsienicowy z napędem hybrydowym, część 1 75 3.1.2. Gąsienicowy układ jezdny W zrealizowanym
Pojazd gąsienicowy z napędem hybrydowym, część 1 77 - kontrola terenów po klęskach
Pojazd gąsienicowy z napędem hybrydowym, część 1 79TRACKED VEHICLE WITH HYBRID DRIVE PART 1 Abstract
Pojazd gąsienicowy z napędem hybrydowym, część 1 67 4. Sieciocentryczne - działają jak sieć rozprosz
Pojazd gąsienicowy z napędem hybrydowym, część 1 69 - masa platformy - ok. 2 t, -
Pojazd gąsienicowy z napędem hybrydowym, część 1 71 3. WIELOZADANIOWY INŻYNIERYJNY POJAZD O NAPĘDZIE
Pojazd gąsienicowy z napędem hybrydowym, część 1 73 Wychodząc z założenia o wielowariantowości
więcej podobnych podstron