43 (395)

OOUJOOZEMIELŁF
■ funkcje kierowania walką elektroniczną (zakłócanie) - Przebiśnieg, Procjon, Breń;
■ kierowanie informacji do systemów kierowania ogniem (Topaz, Azalia, Loara). Oprogramowanie Zautomatyzowanych Miejsc
Pracy Hektora jest wyposażone w prywatne bazy danych, a wymiana danych operacyjnych oparta jest o mechanizm replikacji dopasowany do charakterystyki łączności radiowej w licznych - pod względem liczby użytkowników - sieciach radiowych. Rozproszony system baz danych zwiększa żywotność systemu dowodzenia. W zakres oprogramowania wspomagania dowodzenia wchodzą moduły zapewniające interoperacyjność. Zaliczyć do nich można moduł automatycznej generacji, archiwizacji i wymiany dokumentów sformalizowanych zgodnych ze STANAG 5500, moduł weryfikacji i prezentacji odebranych dokumentów sformalizowanych w postaci graficznej i tabelarycznej. Ponadto zrealizowano moduł DEM, zgodny z zaleceniami JC3IEDM, a także gateway systemowy dla tej normalizacji. Poza szerokimi możliwościami wymiany informacji operacyjnych w natywnych formatach systemu wewnętrznego, zapewniono również szerokie możliwości w zakresie interoperacyjności. System jest w pełni sieciocentryczny, wyposażony dodatkowo w interfejsy programowe, zapewniające dostęp foniczny do sieci radiowych obiektów dowodzenia z odległych od nich stanowisk dowodzenia w systemie VolP, a co najważniejsze - współpracuje z wdrożonymi do SZ RP systemami: Szafran ZT, Irys 2000, Procjon, Przebiśnieg, Topaz, Storczyk, Storczyk-R, Jaśmin, Tuja i Kaktus.
Przyczynkiem do rozpoczęcia przez firmę prac badawczo-rozwojowych, zmierzających w kierunku systemu bezpośredniego kierowania walką, była potrzeba implementacji funkcji wykonawczych związanych z walką w systemie informatycznym związku taktycznego. Potrzeba takiej implementacji została zauważona już dawno, w toku realizacji na potrzeby Sił Zbrojnych RP rodziny Zautomatyzowanych Wozów Dowodzenia Irys 2000. Coraz bardziej widoczny bowiem stawać się zaczął fakt, że możliwa jest w pełni zautomatyzowana dystrybucja informacji o teatrze działań bojowych w całym ugrupowaniu bojowego związku taktycznego, jednak do najniższych elementów ugrupowania, a więc tych, które walczą w starciu bezpośrednim, informacja ta doprowadzana jest w sposób nieefektywny, a więc trudno było mówić o realizacji podstawowego założenia leżącego u podstaw automatyzacji systemów dowodzenia, jakim jest skrócenie czasu reakcji na zaistniałą sytuację bojową. Przygotowanie tej oferty zajęło firmie około czterech lat i tylko przez zbieg okoliczności jej sfinalizowanie zbiegło się w czasie z ogłoszeniem przetargu przez DPZ MON na pracę badawczo-rozwojową Puma-2. KenBIT postawił sobie za cel zrealizowanie systemu, który mógłby się sprawdzić nie tylko w akcjach patrolowych i zabezpieczających na obecnych misjach zagranicznych, ale przede wszystkim w nominalnych działaniach taktycznych, a więc w doraźnych i zaplanowanych operacjach obronnych oraz ofensywnych, w bojach spotkaniowych i w działaniach manewrowych, wymuszających dużą mobilność i mogących się odbywać na całej głębokości ugrupowania związku taktycznego. Stawiano sobie za cel sam w sobie również zapewnienie możliwości zorganizowanego działania w rozczłonkowaniu ugrupowania. Nie pominięto w rozważaniach, stanowiących podstawę do realizacji SKW Hektor, takich elementów, jak np. natarcie w jednolitym pancernym ugrupowaniu bojowym oraz w ugrupowaniu kombinowanym. Kładziono szczególny nacisk na takie momenty działań taktycznych jak: przełamanie, przechodzenie do obrony czy wyprowadzanie kontrataku drugiego rzutu na różnych szczeblach hierarchii ugrupowania. Reasumując, chodziło o stworzenie systemu zabezpieczającego wachlarz działań bojowych w starciu z silnym i dobrze zorganizowanym przeciwnikiem, a nie tylko służącego do „szachowania dzikusów uzbrojonych w dzidy".
Jak zrealizowano te cele w aspekcie technicznym? Przede wszystkim postawiono na prostotę rozwiązania, ale jednocześnie jego wszechstronność.
Na szczeblu pojedynczego żołnierza wyposażenie stanowi terminal doręczny z oprogramowaniem, które umożliwia wymianę danych dokumentalnych w postaci bardzo krótkich, sformalizowanych komend i meldunków z wykorzystaniem radiostacji plecakowej PR4G/F@sfNef lub wie łoza kresowej radiostacji Falcon II. Rozwinięcie tej wersji wyposażenia stanowi zastąpienie radiostacji radiotelefonem RTK-1. W zakres możliwości takiego zestawu wchodzi wymiana sformalizowanych komend dowodzenia i meldunków, auto-
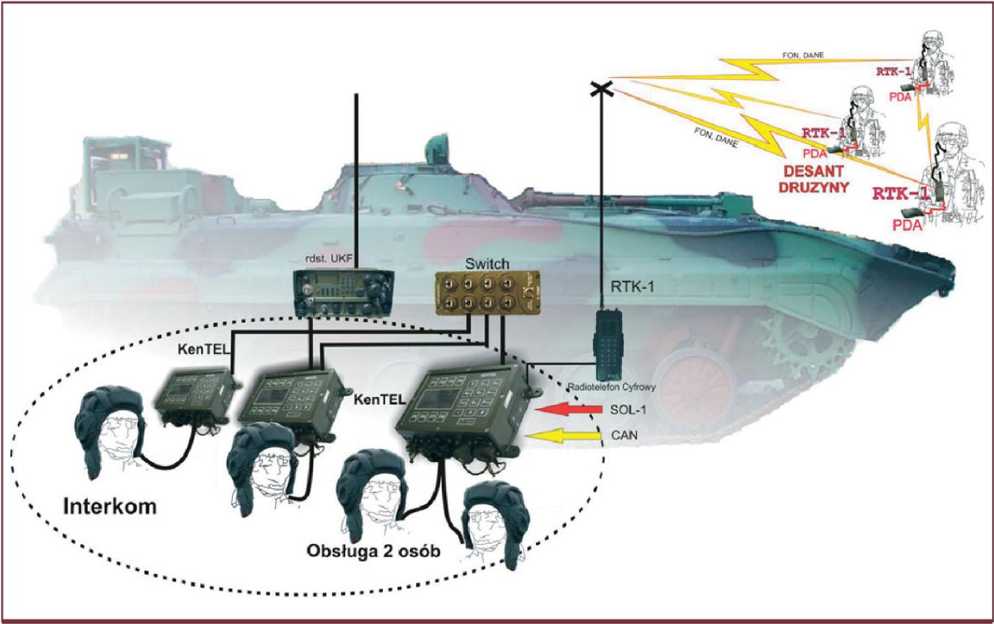
Przykłady konfiguracji systemu Hektor na wozie drużyny Puma (powyżej) oraz wozie dowodzenia szczebla batalionu (na następnej stronie).
ujojsuoujr l/ ćUUD
Wyszukiwarka
Podobne podstrony:
HPIM1744 (Large) ZAKAZ ŁĄCZENIA FUNKCJI Art. 24. * Łączenie funkcji kierownika budowy i inspektora n
SNB13886 60 zrozumienia; ze strony opiekuna ustają całkowicie zasadnicze funkcje kierownic wobec pod
3. Zajmowane stanowiska i pełnione funkcje: 1. Kierownik Samodzielnego Zakładu Informatyki
skanowanie0021 (43) e-Archeo [słownik funkcji faz zasiedlenia - podgląd JPodgląd słownika funkcji fa
skanuj0103 (5) CERAMIKA ZAAWANSOWANA& Inżynieryjna A Ceramika funkcjonalna Bioceramika dla
IMGC80 (2) Metody nauczania i wychowania 69 Preferujący metody nauczania spełnia funkcję kierowniczą
12608 Slajd1 (104) Układ kierowniczy kierownico kolumna kierownicy silnik elektromechanicznego wspom
do sprawowania funkcji kierowniczych w aspekcie zadań i odpowiedzialności. Będzie potrafił zorganizo
a) współdziała z koordynatorami zadań funkcjonalnych i kierownikami jednostek organizacyjnych biorąc
Siec trakcyjna kolejowa funkcjonuje w ramach uprawnień elektrycznych. Podobna sytuacja miałaby miejs
NR 2/2010AUTOMATYKA 1 ELEKTRYKA i ZAKŁÓCENIA e-pismo naukowo-techniczne dla
więcej podobnych podstron