DSC00090 (8)
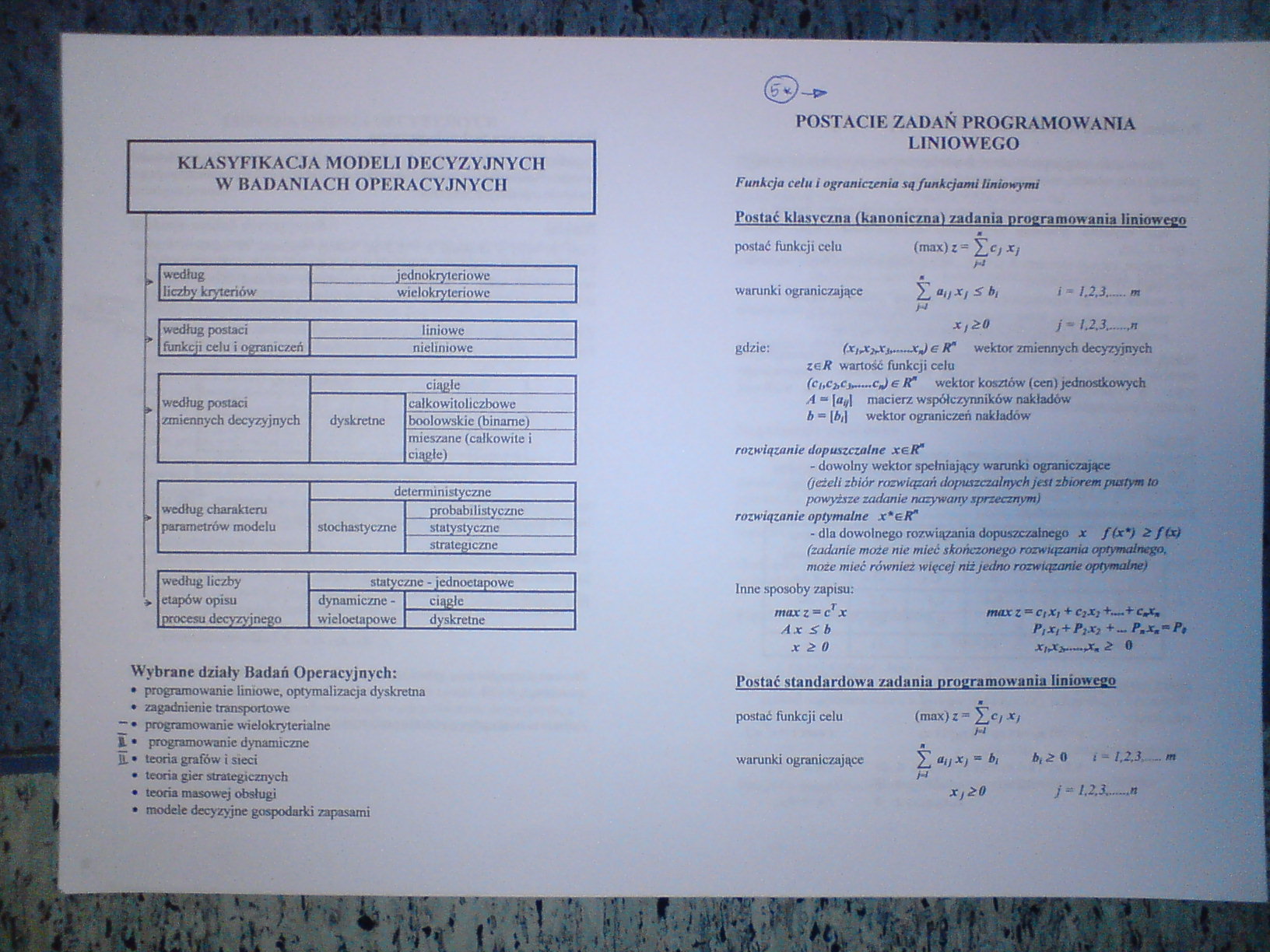
Wybrane działy Badań Operacyjnych:
• programowanie linkiwe, optymalizacja dyskretna | zagadnienie transportowe
P!*»l I
|
według |
jednokryteriowe | ||
|
liczby kryteriów |
wielokryteriowc | ||
|
według postaci |
liniowe | ||
|
► |
funkcji celu i ograniczeń |
nieliniowe | |
|
ciągle | |||
|
4. |
według postaci |
całko witoliczbowe | |
|
zmiennych decyzyjnych |
dyskretne |
boolowskie (binarne) | |
|
mieszane (całkowite i ciągłe) | |||
|
deterministyczne | |||
|
według charakteru |
probabilistyczne | ||
|
parametrów modelu |
stochastyczne |
statystyczne | |
|
strategiczne | |||
|
według liczby |
statyczne - jednoetapowe | ||
|
» |
etapów opisu |
dynamiczne - |
ciągłe |
|
procesu decyzyjnego |
wieloetapowe |
dyskretne | |
• programowanie widokryterialne | programowanie dynamiczne
• teoria grafów i sieci
• teoria gier strategicznych
• teoria masowej obsługi
i modele decyzyjne gospodarki zapasami
POSTACIE ZADAŃ PROGRAMOWANIA LINIOWEGO
Funkcja celu i ograniczenia są funkcjami liniowymi
Postać klasyczna (kanoniczna) zadania programowania liniowego
postać funkcji celu (max) z = ]Tcj x/
H
warunki ograniczające a(y X/ Ś bi i m m
H
xtiO j *• 1X3^____jt
gdzie: (xiX}Xs> xj e R“ wektor zmiennych decyzyjnych
zeR wartość funkcji celu
ĆC/.CiC*_cj e R" wektor kosztów (cen) jednostkowych
A “ [o/y| macierz współczynników nakładów b = (ó/j wektor ograniczeń nakładów
rozwiązanie dopuszczalne xeR“
- dowolny wektor spełniający warunki ograniczające (jeiełi zbiór rozwiązań dopuszczalnych jesz zbiorem pustym to powyższe zadanie nazywany sprzecznym)
rozwiązanie optymalne x*gR"
- dla dowolnego rozwiązania dopuszczalnego X f(x*)£f(x) (zadanie może nie mieć skończonego rozwiązania optymalnego, może mieć również więcej niż jedno rozwiązanie optymalne)
Inne sposoby zapisu: max z = c'x Ax ś b x E 0 i
maxzmciX, + CtXi+~.+cjcm
F,x,+f]X} +_ FmxmmF»
x,jc*-<Xm* ®
Postać standardowa zadania programowania liniowego
postać funkcji celu (max) z =* Ec/ xl
H
bt£ 0 i * 1X3^- m j “ 1X3__Jt
warunki ograniczające

£ a‘Jx> = b‘
w,
XtiO
Wyszukiwarka
Podobne podstrony:
Badania Operacyjne - zajmują się budową i rozwiązywaniem matematycznych modeli decyzyjnych opisujący
Slajd2 6 Badania operacyjne - program zajęć I. Wprowadzenie do nauki badań operacy
Slajd4 9 Wprowadzenie do badań operacyjnych - czym się zajmują BO ? Badania operacyjne stanowią dzie
DSC00094 (7) W Badania OperacyjneMETODA SIMPLEKS Poszukiwanie rozwiązania optymalnego można ogranicz
CCF20111014�004 Scenariusz do badania operacyjnego rozumowania w zakresie wyznaczania konsekwentnych
Badania operacyjne i systemowe w Polsce: środowisko i działalność Polskiego Towarzystwa Badań Operac
Statystyka z elementami badań operacyjnych BADANIA OPERACYJNE - programowanie
AKADEMIA EKONOMICZNA W POZNANIUEKONOMETRIA I BADANIA OPERACYJNE Uzupełnienia z badań
CCF20111014�000 Scenariusz do badania operacyjnego rozumowania w zakresie ustalania stałości długośc
Wykład 5, 02.12.2008 BADANIA OPERACYJNE -dział zajmujący się modelami decyzyjnymi, w których nie
3. Przedstaw klasyfikację modeli problemów decyzyjnych stosowanych w
AKADEMIA EKONOMICZNA W POZNANIUEKONOMETRIA I BADANIA OPERACYJNE Uzupełnienia z badań
skanuj0009 (174) E. Michlowicz: Badania operacyjne i eksploatacyjne - Podstawy3. Podział liniowych z
skanuj0010 (162) E. Michlowicz: Badania operacyjne i eksploatacyjne - Podstawy Kolejną klasą zadań s
więcej podobnych podstron