HWScan00204
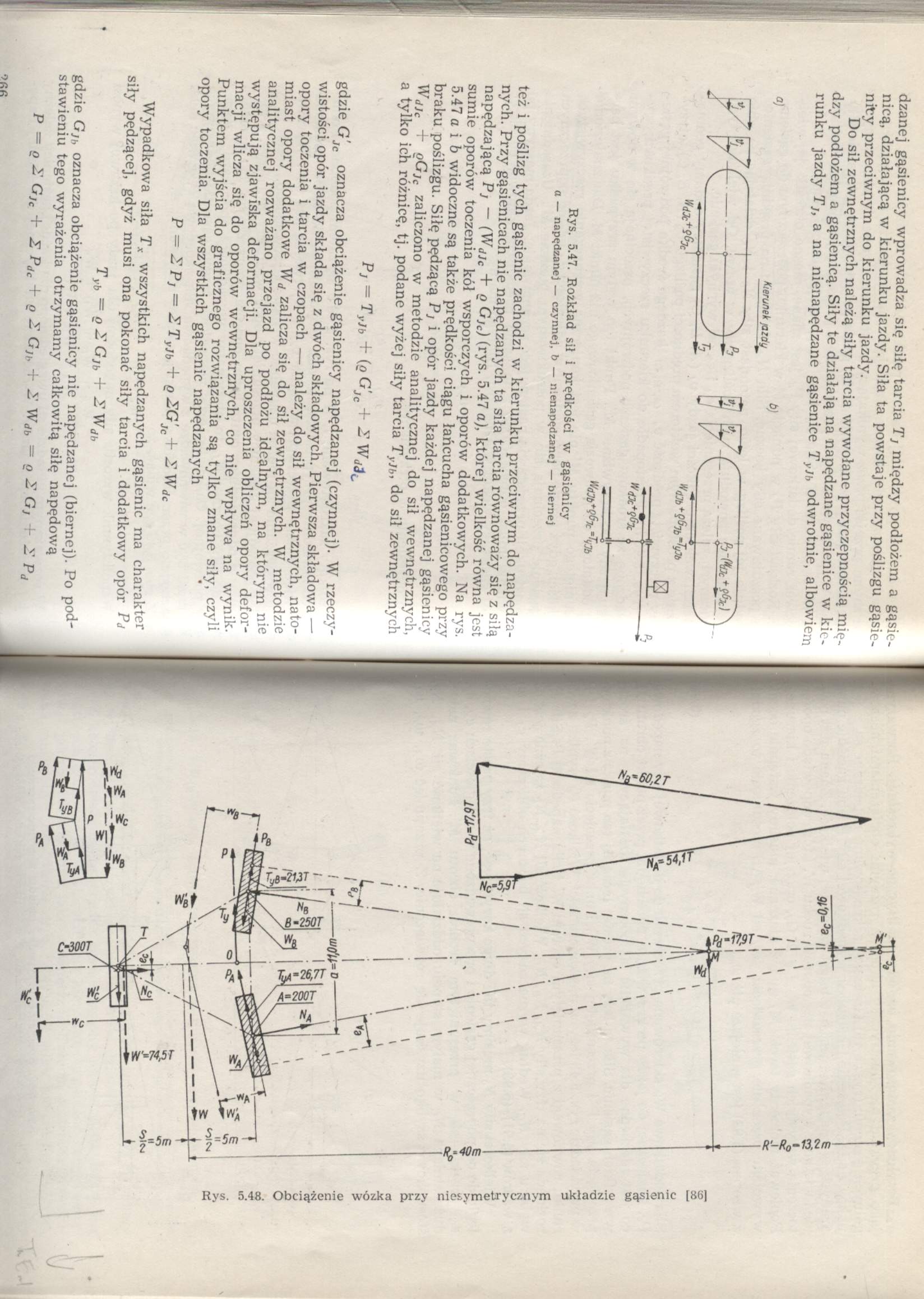
dzanej gąsienicy wprowadza się siłę tarcia Tj między podłożem a gąsienicą, działającą w kierunku jazdy. Siła ta powstaje przy poślizgu gąsienicy przeciwnym do kierunku jazdy.
Do sił zewnętrznych należą siły tarcia wywołane przyczepnością między podłożem a gąsienicą. Siły te działają na napędzane gąsienice w kierunku jazdy Tj, a na nienapędzane gąsienice TyJb odwrotnie, albowiem
Kierunek jazdy

WdJc+9Gjc
b)
WdJb*<?Gyc-TvJb
Rys. 5.47. Rozkład sił i prędkości w gąsienicy a — napędzanej — czynnej, b — nienapędzanej — biernej
też i poślizg tych gąsienic zachodzi w kierunku przeciwnym do napędzanych. Przy gąsienicach nie napędzanych ta siła tarcia równoważy się z siłą napędzającą Pj — (WdJc + o GJc) (rys. 5.47 a), której wielkość równa jest sumie oporów toczenia kół wsporczych i oporów dodatkowych. Na rys. 5.47 a i b widoczne są także prędkości ciągu łańcucha gąsienicowego przy braku poślizgu. Siłę pędzącą Pj i opór jazdy każdej napędzanej gąsienicy W<Uc + °Gjc zaliczono w metodzie analitycznej do sił wewnętrznych, a tylko ich różnicę, tj. podane wyżej siły tarcia TyJb, do sił zewnętrznych
Pj = TyJb + G? G'Jc + Z
gdzie G'JC oznacza obciążenie gąsienicy napędzanej (czynnej). W rzeczywistości opór jazdy składa się z dwóch składowych. Pierwsza składowa — opory toczenia i tarcia w czopach — należy do sił wewnętrznych, natomiast opory dodatkowe Wd zalicza się do sił zewnętrznych. W metodzie analitycznej rozważano przejazd po podłożu idealnym, na którym nie występują zjawiska deformacji. Dla uproszczenia obliczeń opory deformacji wlicza się do oporów wewnętrznych, co nie wpływa na wynik. Punktem wyjścia do graficznego rozwiązania są tylko znane siły, czyli opory toczenia. Dla wszystkich gąsienic napędzanych
P = ZPj = ZTyJb + qZG'Jc + ZWdc
Wypadkowa siła Tx wszystkich napędzanych gąsienic ma charakter siły pędzącej, gdyż musi ona pokonać siły tarcia i dodatkowy opór Pd
Tyh = oZGJb + ZWdh
gdzie Gjh oznacza obciążenie gąsienicy nie napędzanej (biernej). Po pod stawieniu tego wyrażenia otrzymamy całkowitą siłę napędową
P = q Z GJc + Z Pdc + q Z GJb + 2- Wdb — q Z Gj + Z Pd
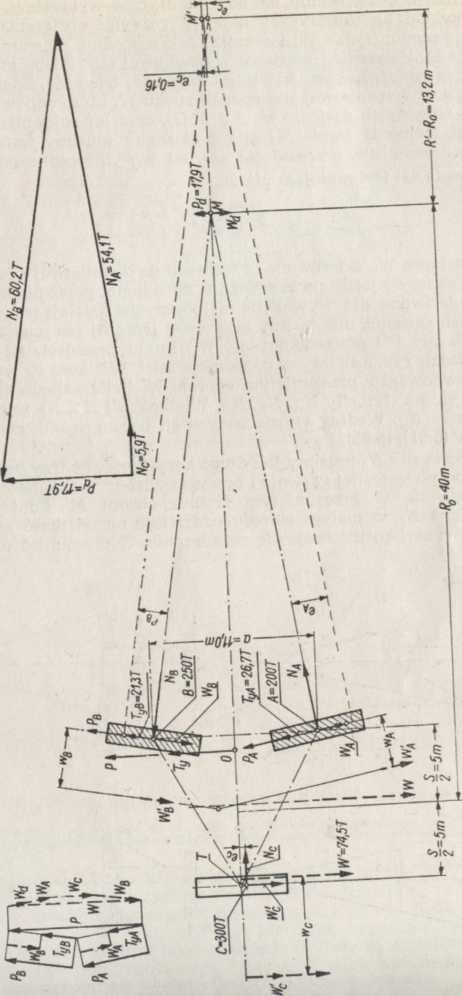
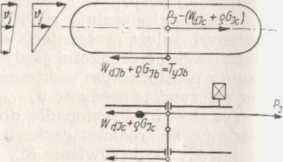
Rys. 5.48. Obciążenie wózka przy niesymetrycznym układzie gąsienic [86]
Wyszukiwarka
Podobne podstrony:
Kotwica0090 178 6. Projektowanie belek drewnianych Jeśli w miejsce słupka wprowadzi się siłę X, pows
W przekładniach ciernych przenoszenie napędu odbywa się dzięki sile tarcia powstającej miedzy docisk
Formatki z tkanin układa się tu na sucho między foremnikami, orientując należycie kierunki splotów w
HWScan00191 Dla obrotu dwóch krawędzi wózka dwugąsienicowego, tj. 2-i-3 gąsienicy lewej, oraz odpowi
16. Wprowadza się tzw. semestry kontrolne, tj. wybrane semestry w okresie studiów,
Zadanie Na rysunkach (1-3) przedstawiono silę F i silę tarcia T, działające na poruszające się ciało
8 M3 SzklarekM ŻurowskiŁ ZAD84 ROZWIĄZANIE W tym zadaniu wprowadziliśmy dodatkową siłę i moment w p
foto (24) Blok 4 - zawiera symbole określające wymagania dodatkowe wyrobom gotowym. Na początku tego
IMAG0236 (2) Ponieważ Ahk<0,0 lm nie wprowadza się korekty rzęcmycn ut Kanał burzowy (I przelewu
Zadanie 47. Materiały wiążące wypełnienie stałe z zębiną wprowadza się do ubytku A.
więcej podobnych podstron