3582317391
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki
Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem. II,
Specjalność: SUM - Inżynieria Produkcji, studia uzupełniające, 2002-2003.
Ćwiczenie nr 3.
Dobór parametrów regulatora - symulacja komputerowa 1. Wstęp
Najprostszy układ automatycznej regulacji można przedstawić za pomocą schematu blokowego podanego na rys. 1.1 . Na schemacie tym występują dwa bloki podstawowe, a mianowicie obiekt regulacji i regulator, które są podstawowymi elementami najprostszego układu regulacji. Pod pojęciem obiektu regulacji rozumiemy tę część układu automatycznej regulacji, na której własności nie mamy wpływu, gdyż jest narzucona. Regulatorem zaś jest pozostała część układu automatycznej regulacji o własnościach tak dobranych, aby zestawiony układ posiadał wymagane własności. W obiekcie jednowymiarowym wyróżniamy następujące sygnały, sygnał regulowany y , sygnał regulujący x , sygnały zakłócające z^z2,...,zn .
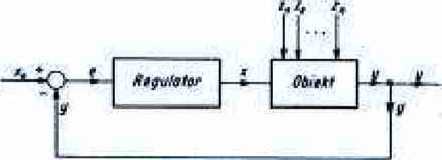
Rys 1.1 Schemat blokowy typowego układu automatycznej regulacji Sygnał regulowany lub sygnał wyjściowy y jest to ten sygnał, który mimo zmieniających się warunków pracy obiektu, czyli jak mówimy mimo przychodzących sygnałów zakłócających ma być utrzymywany stały w czasie lub zmieniać się według
określonej funkcji wyznaczonej sygnałem , zwanym sygnałem sterującym lub sygnałem zadanym. Porównania sygnału regulowanego i sygnału sterującego dokonuje
1
Wyszukiwarka
Podobne podstrony:
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii
P1180734 POLITECHNIKA ŚWIĘTOKRZYSKA WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN LABORATORIUM WYTRZYMAŁ
POLITECHNIKA ŚWIĘTOKRZYSKA WYDZIAŁ MECHATR I BUDOWY MASZYN Bogdan Antoszewski Wojciech
POLITECHNIKA ŚWIĘTOKRZYSKA WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN LABORATORIUM WYTRZYMAŁOŚCI
Politechnika Świętokrzyska WYDZIAŁ MECHATRONIKI I BUDOWY MASZYNWYDZIAŁOWA KSIĘGA JAKOŚCI
Politechnika Świętokrzyska WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN Automatyka i Robotyka
Politechnika ŚwiętokrzyskaKB-WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN Koło naukowe KLAKSON jest dobrowol
Politechnika ŚwiętokrzyskaKB-WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN 2.4. Promocja Wydziału Uczelnia
Politechnika ŚwiętokrzyskaKB-WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN eksploatacji oraz sterowania i
Politechnika ŚwiętokrzyskaKB-WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN Absolwenci powinni mieć wpojone na
Politechnika ŚwiętokrzyskaKB-WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN systemu transportowego. Potrafią,
Politechnika ŚwiętokrzyskaKB-WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN zawodowych będzie przygotowany do
Politechnika ŚwiętokrzyskaKB-WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN Powołano Radę Interesariuszy WMiBM
więcej podobnych podstron