2025202317
Automatyka i Robotyka
Ppdłlawy Modelowana I Syntezy Mechanizmów
Analiza statyczna i fclnetostatyczna mochamzmow CZ.l.
Siły czynne są z reguły siłami zewnętrznymi i są to najczęściej siły rozwijane przez silniki napędowe np. spalinowe, elektryczne, pneumatyczne i hydrauliczne i wiatrowe, wodne i inne. Siły bierne są to zewnętrzne siły oporów użytecznych nazywane siłami oporów technologicznych lub siły oporów szkodliwych np. zewnętrzny opór ruchu samochodu lub wewnętrzny opór tarcia w parze kinematycznej.
Przykładami użytecznych zewnętrznych oporów technologicznych są np. opory skrawania w obrabiarkach, opory kruszenia w kruszarkach, siły oporów sprężania w pompach, sprężarkach itp.
3) Ze względu na przyczynę powstawania siły działające na mechanizmy można podzielić na:
- siły ciężkości, czyli siły pola grawitacyjnego (G=mg) zgodnie z prawem grawitacji zależne od położenia, w przypadku małych przemieszczeń przyjmujemy je jako stałe ponieważ przyspieszenie ziemskie przyjmujemy g const.
siły tarcia suchego, których wartość jest w przybliżeniu stała a zwrot zależny od prędkości względnej członów zgodnie z prawem Coulomba.
- siły tarcia wiskotycznego proporcjonalne do prędkości (pierwszej pochodnej przemieszczenia),
- siły bezwładności proporcjonalne do przyspieszenia (drugiej pochodnej przemieszczenia),
siły zależne równocześnie od szeregu parametrów np. czasu, przemieszczenia prędkości, przyspieszenia itp.
Opracował: J. Fe4s
Automatyka i Robotyka
fodstawy Modelowania i Syntezy Mechanizmów_Anafaa statyczna i kinctostatyczna mechanizmów CZ.l.

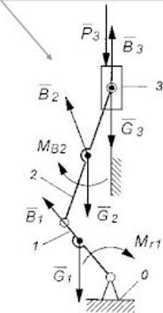
Rys. 1d wszystkie siły zewnętrzne przyłożone do mechanizmu w tym również moment równoważący ,, przyłożony do członu napędzającego
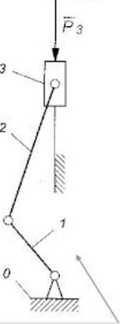
Rys. 1 a - Siła oporów użytecznych P3 Jest to siła bierna oporów sprężania.
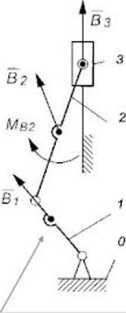
Rys. 1c — siły bezwładności członów , B2, B3, ora z moment od sił bezwładności - MB2. przyłożony do członu 2.
Rys. 1. Siły zewnętrzne przyłożone do członów mechanizmu korbowo-suwakowego
Opracował. J. F®*s
Wyszukiwarka
Podobne podstrony:
Automaty** i Robotyka Podstawy Modelowana I Syntezy Mechanizmów Anat z a statyczna i klnetostat
Automatyk* 1 Robotyka Ppdłlawy Modelowana I Syntezy Mochanumow Anatza statyczna i klnetostatyczna
Automatyka i Robotyka Podstawy Modelowania I Syntezy Mochanumow Anat za statyczna i klnetostatyczna
Automatyka i Robotyka Podstawy Modelowania i Syntezy
Aspekty modelowania 000*0000 Analiza statyczna konstrukcji przy użyciu MES OOOOOOOOOOMetody komputer
Aspekty modelowania 00000*00 Analiza statyczna konstrukcji przy użyciu MES OOOOOOOOOOEtapy procesu
Aspekty modelowania konstrukcji OOOOOOOO Analiza statyczna konstrukcji przy użyciu MES
Aspekty modelowania 000*0000 Analiza statyczna konstrukcji przy użyciu MES OOOOOOOOOMetody komputero
Aspekty modelowania 00000*00 Analiza statyczna konstrukcji przy użyciu MES OOOOOOOOOEtapy procesu
66463 P1010327 (3) Tablica 11.36 Zadania analizy statycznej i kinetostatycznej mechanizmów Analiza s
Wydział MechanicznyPolitechniki Białostockiej I Katedra: Automatyki i Robotyki Instrukcja do zajęć
Aspekty modelowania OOOOOOO* Analiza statyczna konstrukcji przy użyciu MES OOOOOOOOOOpracowanie mode
Lp. 1. Wydział Mechaniczny AUTOMATYKA I ROBOTYKA studia dzienne magisterskie Specjalność:
74936 P1010328 (3) Tablica 11.38 Zadania analizy statycznej i kinetostatycznej mechanizmów Tablica 1
więcej podobnych podstron