2740390556
4. Część elektroniczna
Konstrukcja robota jest wyposażona w trzy silniki odpowiedzialne za prawidłowe zrealizowanie zadanej trajektorii. Silniki są obsługiwane przez układ sterujący, który jest odpowiedzialny za pomiar niezbędnych parametrów ruchu, takich jak prędkość czy położenie. Sterownik współpracuje z komputerem, komunikując się z nim w celu wysyłania informacji o aktualnych położeniach czujników pomiarowych oraz pobierania instrukcji do wykonywania zadania. Schemat blokowy sterownika przedstawia rysunek 13.
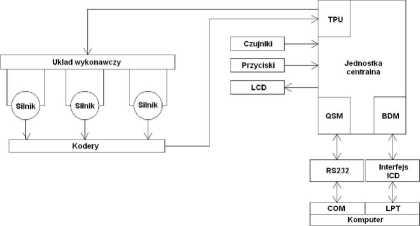
Rysunek 13 Schemat blokowy sterownika
4.1 Silniki
Do napędu robota wykorzystane zostały 3 zespoły firmy Maxon złożone z:
• Silników prądu stałego typu RE-max;
• Przekładni planetarnych typu GP;
• Koderów typu MR.
Każdy z silników jest zasilany napięciem 12V. Dobrane zostały do momentów obrotowych, jakie są potrzebne do optymalnego ruchu ramion manipulatora. Parametry zespołów napędowych przedstawia tabela 3.
11
Wyszukiwarka
Podobne podstrony:
3.3 Układ napędowy Ważnym problemem w konstrukcji robota jest dobranie odpowiednich elementów napędo
3.4 Przewody Ważną częścią konstrukcji robota jest prawidłowe rozmieszczenie przewodów
Elektrownia Wodna Żarnowiec jest wyposażona w cztery odwracalne, hydrozespoły (turbiny typu Francis,
2. Jeżeli lokal mieszkalny nie jest wyposażony w instalację ciepłej wody, za
2tom217 5. MASZYNY ELEKTRYCZNE 436 przyspieszonej, w którym co prawda silnik nadąża za powolnymi zmi
I AUTOMATYKA-ELEKTRYKA-ZAKŁÓCENIA
DSCF3061 Rytmika dobowa procesów biologicznych jest sterowana przez geny odpowiedzialne za
25a (2) Szyszynka Szyszynka ulokowana jest w tylnej części wzgórza i odpowiada za produkcję: me
CIMG2563 90 CZĘŚĆ I • Zarządzanie zasobami ludzkimi - wprowadzenia Lokalnie czy centralnie Odpowiedz
skanuj0005(2) ELEMENTY URZĄDZEŃ ELEKTRYCZNYCHCzęść konstrukcyjna Część
więcej podobnych podstron