3236691061
W związku z tym zjawiskiem zaobserwowanym podczas pomiarów autor zdecydował się dołączyć do modelu równolegle drugi człon inercyjny pierwszego rzędu.
Za szybki wzrost temperatury w pierwszej fazie odpowiada człon inercyjny ze stałą czasową i wzmocnieniem proporcjonalnymi do Tx i Kx. Za powolny wzrost temperatury po osiągnięciu stanu ustalonego przez człon pierwszy człon drugi, którego parametry - stała czasowa i transmitancja są proporcjonalne do wartości T2 i K2, widocznych na wykresie.
2.4.Model obiektu
W oparciu o model matematyczny i po uwzględnieniu zaobserwowanych doświadczalnie zjawisk zbudowano w programie Simulink model obiektu pokazany na Rys. 2.7.
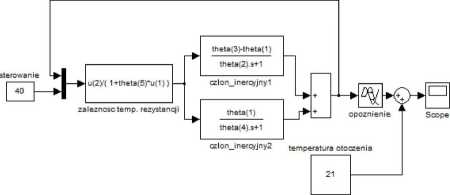
2.7 Model obiektu PT326
Składa się on z dwóch członów inercyjnych połączonych równolegle. Przed nimi znajduje moduł uwzględniający zależność rezystancji grzałki od temperatury (wzór 2.12). Na końcu jest bloczek opóźnienia i sumator dodający temperaturę otoczenia.
2.5.Dobór parametrów modelu
Korzystając z pomiarów odpowiedzi obiektu na skok sterowania w układzie otwartym dopasowano współczynniki d. Wartości sterowania podawanego na wejście dobrano dzieląc zakres sterowania 0-10V na 5 części. W konsekwencji uzyskano pomiary odpowiedzi obiektu na skok sterowania o wartościach 2, 4, 6, 8, 10V. Estymację parametrów modelu przeprowadzono za pomocą programu Matlab i metody najmniejszych kwadratów. Opis zastosowanych skryptów znajduje się w Dodatku A.
14
Wyszukiwarka
Podobne podstrony:
Podczas pomiarów system kontr olno-pomiarowy zawiesił się. W związku z tym po 22 minucie pomiaru kom
dzwonki (7) Objaśnienia W związku z tym, że nie zawsze symbole angielskie pokrywają się z polskimi,
poruszające go tematy. W związku z tym staje przed sytuacją przymusowego milczenia i zamyka się w so
Czy w związku z tym należy rozumieć, że rozdzielczości te pojawiły się w warunkach równoważności
P1050443 i KONDUKTOMETRIA Podczas wykonywania pomiaru należy stosować się ściśle do instrukcji obsłu
samorządowych w 2011 roku i opublikowaniu ponad 2 tysięcy tekstów, autor zdecydował się zawiesić
40 Garlikowska M. W związku z tym, potrzebna jest atrakcyjna, bogata oferta w celu zachęcenia klient
54 stąd udać się do Warszawy. Delegacja ta podczas bytności w Poznaniu udała się wpierw do bawiącego
Rzut dyskiem0013 miotaczowi równowagę, a tym samym l swobodę mchu. Głowy me pochyli się ani do prawe
więcej podobnych podstron