121049

1 schemat zniszczenia - uplastycznienie prętów 1 i 2

Jedyny dopuszczalny ruch wynika z obrotu prętów 3 i 4 wokół ich punktów podparcia. Powoduje to przesunięcie równoległe tarczy w wektor u.
Zapisujemy zasadę pracy wirtualnej
PjjrU S|p|U j-S2p|U=0
i po podstawieniu nośności prętów S|Pi = A opi. S2pi = A obliczamy, że dla u ^ 0 Pgr = O "**2 )actp| =2.414 Aop|.
II schemat zniszczenia - uplastycznienie prętów 1 i 3
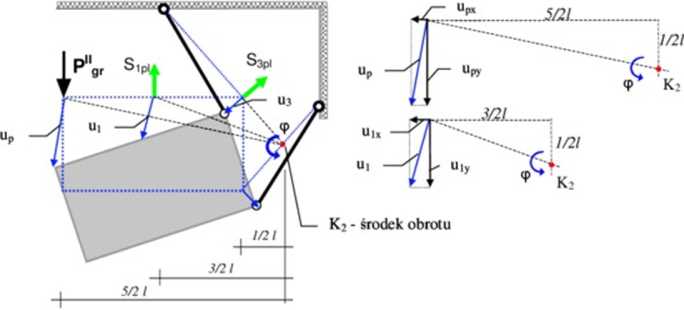
W powstałym mechanizmie tarcza obraca się wokół chwilowego środka obrotu w punkcie Kj. Równanie pracy wirtualnej
Pgrupy -Slpluly “S3plu3 = 0 po podstawieniu zależności
S|Pi = A Opj, — 2A op,
5, 3 -J2
uly =<I)2I “3=<P 2 1
sprowadza się do równania
P" * q>I - AtJp, | <pl- 2A<jp| j Ol = 0.
Wyszukiwarka
Podobne podstrony:
Mechanizmy zniszczenia węzłów prętów rurowych (a) zniszczenie przystykowe pasa [plastyczne
Mechanizmy zniszczenia węzłów prętów rurowych - ilustracja
kol1 zadanie1 A 2. Nanieść na schemacie najwcześniejsze możliwe oraz najpóźniejsze dopuszczalne
III. Stan wojenny 407 działania). Jedynym dopuszczalnym odstępstwem od normalnego zakresu kompetencj
WERSJA SKRÓCONA Niepewność pomiaru jest nie większa niż graniczny dopuszczalny błąd wynikający z kla
Rys. 5. Schemat procesu wytłaczania. Tabela 3. Najmniejsze dopuszczalne wartości współczynnika
Schemat 2 Podział mierników efektywności wartości. Mierniki księgowe wynikające
118 B. Baronf Z. Garczarczyk 4. Schemat blokowy identyfikacji Ze wzorów (20) i (21) wynika, że Jeżel
skanuj0409 Rys. 16.5. Schematy mechanizmów korbowych: a) symetrycznego, b) niesymetrycznego przechod
Po uzyskaniu ewentualnej zgody KPWiG na dopuszczenie do publicznego obrotu, emitent deponuje papiery
skanuj0008 (253) 132 Rysunek techniczny8.2. Schematyczne rysowanie prętów i kształtowników’ Przy rys
skrypt wzory i prawa z objasnieniami38 74 Ruch obrotowy ciała ■ Jak wynika z własności iloczynu wekt
więcej podobnych podstron