Grupa B5 |
Temat: Badanie wpływu sprzężenia zwrotnego na odpowiedzi układów inercyjnych |
data: 23 03 98 |
Marian Małkowski Joanna Mendruń |
godz. 11-00 |
ocena: |
1.Badanie wpływu sprzężenia zwrotnego na charakterystyki czasowe i częstotliwościowe układu automatycznego.
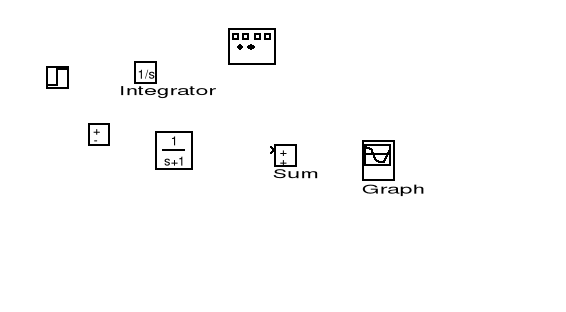
otwarty układ
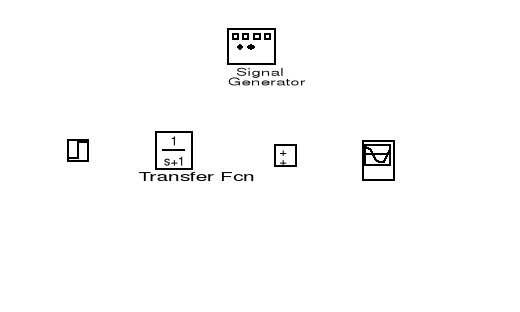
Obiekt inercyjny na wy powinien mieć wartość 1,lecz z powodu zakłóceń sygnałem piłokształtnym na wy (graph) obserwujemy nakładanie się sygnałów.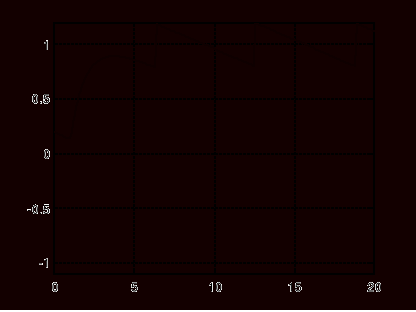
b)zamknięty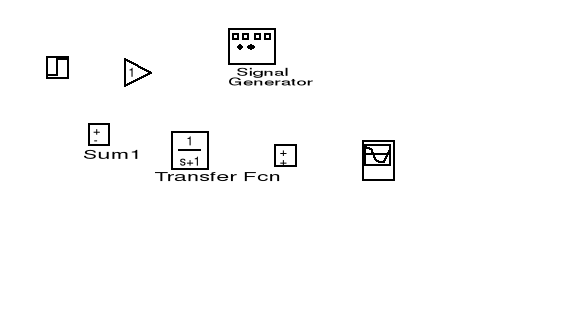
Z wyjścia układu (sum) podaliśmy sygnał na jego wejście (sum1) czyli zastosowaliśmy sprzężenie zwrotne.
Układ regulacji z regulatorem typu P (sygnał wejściowy nigdy nie osiągnie podanej wartości) rys1.
Układ statyczny uchyb regulacji na końcu sprawozdania
W układzie przy wzroście wzmocnienia mogą wystąpić oscylacje i układ może nawet stać się niestabilny( co widzimy na rys2 w układzie z inercją rzędu III )


rys 1 rys2
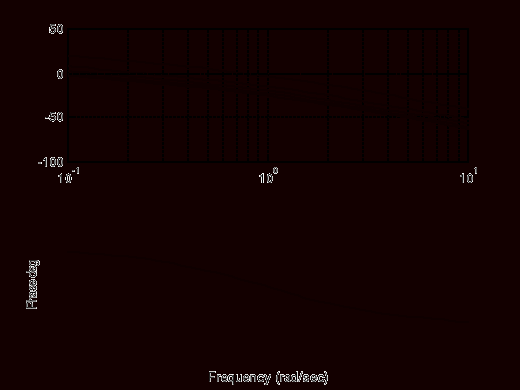
Charakterystyki Bodego
badanie stabilności układu z punktu 1.a na podstawie charakterystyk układu otwartego w zależności od wzmocnienia
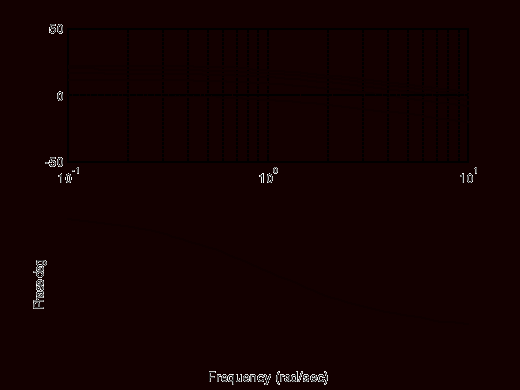
b)zapas fazy w układzie (układ z punktu 1.b dla inercji III rzędu)
układ niestabilny jest gdy na charakterystyce Bodego przy przesunięciu fazowym= -180 stopni amplituda wzmocnienia jest jeszcze dodatnia
układ jest stabilny tylko przy wzmocnieniu k=1,
zapas amplitudy

widzimy że tylko w przypadku gdy k=1 układ jest stabilny (posiada przy przesunięciu fazowym amplitudę ujemną zatem zapas fazy i amplitudy jest spełniony a dla k>1 układ jest niestabilny ,bo nie spełnia warunków stabilności .)
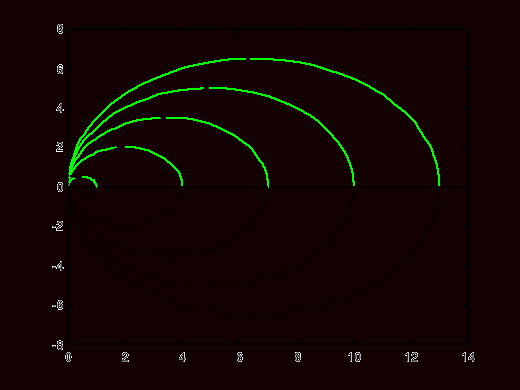
3.Charakterystyki Nyquista
dla inercji rzędu I i III dla różnych wartości k
Jeżeli charakterystyka obejmie punkt [-1,j0] to układ jest niestabilny.
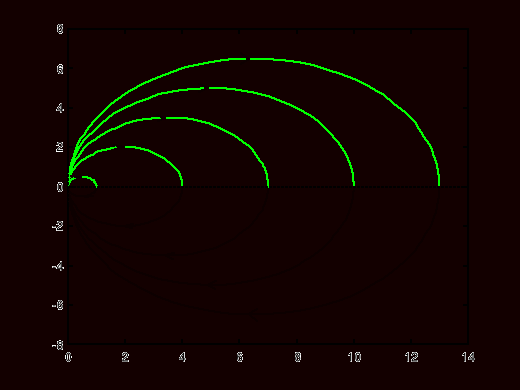
układ stabilny( charakterystyka nie obejmuje punktu [-1,j0])
jest to układ z punktu 1.b z inercją I rzędu

układ niestabilny( charakterystyka obejmuje punkt [-1,j0]) jest to układ z punktu 1.b z inercją III rzędu i przy k>1 ,widzimy że przy k=1 układ jest stabilny.
wpływ sprzężenia na położenie zer i biegunów

wartości biegunów
numc =
0 1
denc =
1 2
r = -3
-6
-9
-12
-15
k = 1 4 7 10 13
Inercja II rzędu w układzie ze sprzężeniem zwrotnym 
wartości biegunów
numc =
0 0 1
denc =
1 2 2
r =
-1.0000 + 1.4142i -1.0000 - 1.4142i
-1.0000 + 2.2361i -1.0000 - 2.2361i
-1.0000 + 2.8284i -1.0000 - 2.8284i
-1.0000 + 3.3166i -1.0000 - 3.3166i
-1.0000 + 3.7417i -1.0000 - 3.7417i
k =
1 4 7 10 13
Inercja III rzędu w układzie ze sprzężeniem zwrotnym
niektóre dane układu
numc =
0 0 0 1
denc =
1 3 3 2
numc =
0 0 0 1
denc =
1 3 3 2
Wnioski:
regulator P ma zaletę jedną : w miarę wzrostu k różnica między sygnałem spodziewanym a otrzymanym maleje( nigdy nie osiąga wartości spodziewanej(teoretycznej)) rys.1 ale przy zbyt dużym k układ może stracić stabilność!
Regulator typu I
Aby różnica między sygnałem spodziewanym a otrzymanym była minimalna (dochodziła do zera)musimy wprowadzić układ całkujący.
rys3 regulator I

widzimy że uchyb dąży do zera.(dla układu z rys3)
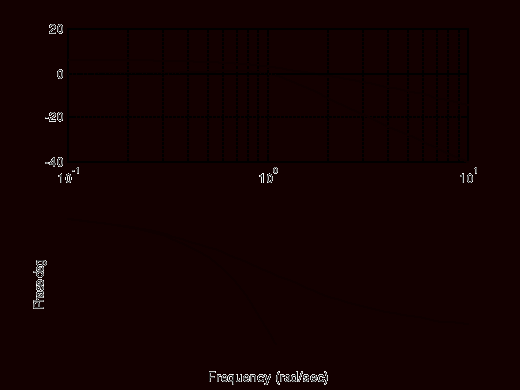
charakterystyki Bodego (dla układu z rys3 przy wartości k=1do5)
charakterystyki Nyquista (dla układu z rys3 i wartości k=1 do5)

Regulator typu PI
Faktyczny układ regulatora PI wygląda następująco
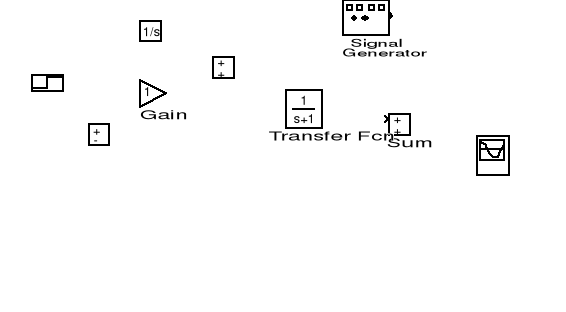

Widzimy że regulator może tak wyregulować układ z inercją ,aby jego odpowiedź była on zbliżona do teoretycznej (w naszym przypadku inercji I rzędu) mimo występujących zakłóceń
b) charakterystyki Bodego
Nie ma oscylacji ,układ jest bardziej stabilny ,lepiej reguluje
co przedstawiają poniższe poszczególne charakterystyki P, I ,PI


charakterystyki Nyqista
Uwagi i wnioski:
Celem ćwiczenia było zbadanie wpływu sprzężenia zwrotnego na zachowanie się układu na którego działa zakłócenie. Z przeprowadzonych obliczeń wynika że wprowadzenie sprzężenia zwrotnego z wzmacniaczem polepsza własność układy tzn. Że regulator dąży do wartości zadanej. Jednak w przypadku regulatora typu P trzeba zwrócić uwagę na wzmocnienie układu ponieważ układ może stać się niestabilny co obserwujemy na charakterystykach Bodego i Nyquista (brak zapasu fazy i amplitudy) inną wadą regulatora P jest wrażliwość na inercje regulowanego obiektu ponieważ wraz ze wzrostem rzędu inercji układy obserwujemy skłonności do braku stabilności układy ,wadą regulatora typu P jest to że uchyb nigdy nie dąży do zera.
Zniweczenie tej wady obserwujemy w regulatorze typu I jednakże całkowanie w regulatorze pogarsza stabilność regulatora co nie jest zjawiskiem pożądanym w regulatorze. Pozbycie się tych obu wad widzimy dopiero w regulatorze typu PI co pokazują charakterystyki Bodego i Nyquista
Wyszukiwarka
Podobne podstrony:
Ćwiczenie nr 7 Twierdzenie?tti Maxwella i jego wykorzystanie grupa 2 B5
GRUPA CZASOWNIKÓW REGULARNYCH ZAKOŃCZONYCH NA AR
Regulacja nerwowo hormonalna Grupa B (GIM 2)
Regulacja nerwowo hormonalna Grupa A (GIM 2)
GRUPA CZASOWNIKÓW REGULARNYCH ZAKOŃCZONYCH NA AR
Genetyka regulacja funkcji genow
REGULACJA UKLADU KRAZENIA 2
test poprawkowy grupa 1
33 Przebieg i regulacja procesu translacji
8 ocena jakości układów regulacji
WYKŁAD 11 SPS 2 regulatory 0
19 183 Samobójstwo Grupa EE1 Pedagogikaid 18250 ppt
WYKŁAD 7 Szeregowy regulacja hamowanie
Grupa 171, Podstawy zarządzania
więcej podobnych podstron