3826200341
str. 7
Opracowanie wyników pomiarów - oszacowanie niepewności pomiaru
E. Przykłady zastosowania reguł A,B i C
E.l Obliczenie niepewności typu A dla serii niezależnych pomiarów tej samej wielkości_|
Wielokrotnie zmierzono czas ruchu przyspieszonego ciężarków zawieszonych na nici przełożonej przez bloczek, przy tej samej przebywanej drodze s = 50 cm. Różnica mas ciężarków zawieszonych po obu stronach bloczka wynosi ok. m = 3,48 g. Pomiaru czasu dokonywano za pomocą elektronicznego stopera uruchamianego ręcznie - zarejestrowano n = 10 pomiarów czasu, po odrzuceniu wyników skrajnych, zbyt znacząco odbiegających od pozostałych i ocenionych jako pomyłkowe. Wyniki zarejestrowanych pomiarów są następujące:
|
i |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
tt [s] |
4,34 |
4,02 |
4,22 |
4,39 |
4,12 |
4,18 |
4,28 |
4,43 |
4,32 |
4,13 |
Obliczone w oparciu o procedurę A.l estymaty: wartość średnia oraz odchylenia standardowe:
1 V-"1 Sti
t=-'2j t( = 4,2430 s , Sti = 0,1314s = 0,13 s , Sj = -j= = 0,04156s = 0,042 s .
Jako wynik pomiaru przyjmujemy t = t = 4,243 s oraz niepewność standardową u(t) = Sj = 0,042 s . Niepewność rozszerzoną obliczamy (zgodnie z A.4 i D.l) dla poziomu ufności p = 95% oraz liczby stopni swobody v = n — 1 = 9 otrzymując z tablic współczynnik rozszerzenia kp = 2,32 , a zatem l/(t) = kp • u(t) = 2,32 • 0,04156 s = 0,096 s . Wynik pomiaru czasu wraz z niepewnością rozszerzoną (dla p = 95% i kp = 2,32): t — 4,243 s ± 0,096 s.
| E.2 Obliczanie niepewności typu A dla parametrów określających zależność liniową mierzonych wielkości
|
[mm] |
r"i |
|
0 |
0 |
|
57 |
20 |
|
134 |
40 |
|
185 |
60 |
|
258 |
80 |
|
316 |
100 |
|
386 |
120 |
|
451 |
140 |
|
502 |
160 |
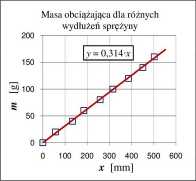
W najprostszym modelu liniowym siła obciążająca wywołuje proporcjonalne do niej wydłużenie sprężyny F0bciaz = k ■ x, gdzie k jest współczynnikiem sprężystości sprężyny. Dla wzrastających mas zawieszanych na sprężynie otrzymujemy różne wartości siły obciążającej F0bciaz = m ■ g i tym samym różne wydłużenia - wyniki takich pomiarów zamieszczono w tabeli obok.
Zgodnie z przyjętym modelem, zależność pomiędzy masą i wywołanym przez nią wydłużeniem jest następująca:
k liniowa zależność
m — — ■ x -> y — a ■ x ,
9

Już sama prezentacja wyników pomiaru na wykresie pokazuje, że wynikająca z modelu fizycznego zależność liniowa potwierdza się w tym doświadczeniu, przy stosowanej precyzji pomiarów. Obliczenia przeprowadzone zgodnie z A.2 (z pomocą F.l lub F.2) pozwalają określić współczynnik korelacji r = 0,99986 = 1,00, oznaczający bardzo dobrą zgodność modelu liniowego z wynikami pomiarów, a ponadto obliczyć możemy wartość współczynnika kierunkowego oraz odpowiadającą mu niepewność standardową: a = 0,314214 kg-m'1 , u(a) = Sa = 0,0018914 kg-m'1 przy liczbie stopni swobody v = n — 1 = 8.
Jeśli zadanie polega jedynie na wyznaczeniu współczynnika kierunkowego, to dla znanej liczby stopni swobody oraz przy poziomie ufności p = 95% wyznaczamy z tablic (D.l lub A.4) wartość współczynnika rozszerzenia, który w tym przypadku wynosi kp = liii, a następnie obliczamy (A.2) niepewność rozszerzoną U (a) = kp ■ u (a) otrzymując wartość U (a) = 0,004483 kgm'1 = 0,0045 kgm'1 , aby w rezultacie podać wynik (wg. D.3): a = (0,3142 ± 0,0045) kg-m'1 (dla kp = 2,37 przy p = 95%)
Jeżeli celem dodatkowym doświadczenia jest wyznaczenie współczynnika k sprężystości sprężyny, to przyjmując wartość przyspieszenia ziemskiego g = 9,811 m-s'2, obliczamy zgodnie z modelem k = a ■ g oraz stosujemy regułę C.l dla złożonej niepewności standardowej u(k) = yjg2 ■ u2(a) + a2 • u2(g) , przyjmując niepewność standardową u(g) = (0,005 m-s'2)/V3. W rezultacie otrzymujemy: k = 3,08275 N-m'1 , u(/c) = 0,018557 N-m'1 oraz (przy kp = 2,37 dla p = 95% i v = 8) obliczoną niepewność rozszerzoną U(k) = 0,04399 N-m'1 = 0,044 N-m'1. Ostatecznie podajemy wyznaczony współczynnik sprężystości sprężyny (zgodnie z D.3):
k = (3,083 ± 0,044) N-m'1 (dla kp = 2,37 przy p s= 95%)
Wyszukiwarka
Podobne podstrony:
str. 7 Opracowanie wyników pomiarów - oszacowanie niepewności pomiaruE. Przykłady zastosowania reguł
str. 7 Opracowanie wyników pomiarów - oszacowanie niepewności pomiaruE. Przykłady zastosowania reguł
str. 8 Opracowanie wyników pomiarów - oszacowanie niepewności pomiaru E.3 Niepewność typu B dla
str. 8 Opracowanie wyników pomiarów - oszacowanie niepewności pomiaru E.3 Niepewność typu B dla
str. 8 Opracowanie wyników pomiarów - oszacowanie niepewności pomiaru E.3 Niepewność typu B dla
©msg Opracowanie wyników pomiarów - oszacowanie niepewności pomiarustr. 10 E.7 Przykład obliczenia
Str. 12 Opracowanie wyników pomiarów - oszacowanie niepewności pomiaruLiteratura, materiały
Opracowanie wyników pomiarów:Metody oszacowania niepewności pomiaru Celem niniejszego opracowania je
©msg Opracowanie wyników pomiarów - oszacowanie niepewności pomiarustr. 3A. Metoda typu A oszacowani
więcej podobnych podstron