9157784644
Układy grawitacyjne 61
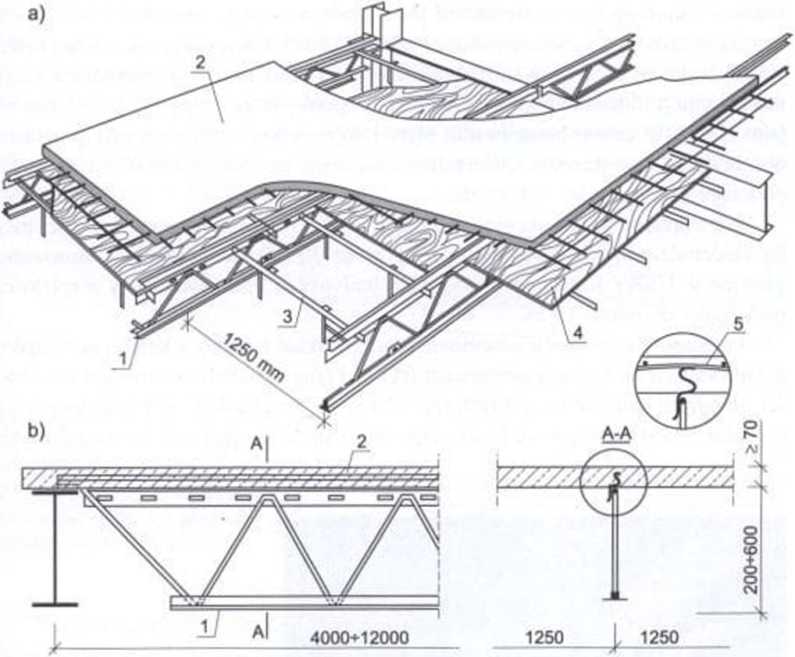
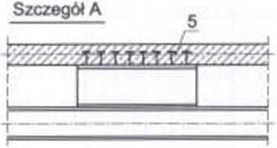
Rysunek 3.9. Strop zespolony systemu Hambro. wg |30|: a) schemat, b) szczegóły konstrukcyjne; / - belka kratowa. 2 - monolityczna płyta żelbetowa. 3 - inwentaryzowane podpory deskowania. 4 - inwentaryzowane deskowanie ze sklejki. 5 - ciągła siatka zbrojeniowa płyty
A 4
rĆTTT
b)
1/
3/
|
CN | |
|
i-rr |
t ' v.....ir.....r- |
|
! i . J/ |
3/ |
Rysunek 3.10. Podciąg o konstrukcji ażurowej, wg |15J: a) widok, b) przekrój, c) alternatywne wykonanie części przypodporowej podciągu; I dwuteownik szerokostopowy, 2 - płyta żelbetowa stropu. 3 - element pośredni z dwuteownika, 4 - belka stropowa, 5 - łącznik sworzniowy
architrend.pl
Wyszukiwarka
Podobne podstrony:
Jak się dogadać z komputerem? Rysunek 1.1. Wskazówka: Uruchom system operacyjny -
P1080209 Rysunek 3J^___ Możliwości systemu Fibromanta w zakresie budowy różnych urządzeń manipulacyj
17 ISTOTA MECHATRONIKI3.3. Układy wykonawcze Układy wykonawcze (aktory) stanowią istotny element sys
14 1 ZESTAW 1 - UKŁADY WE1.5 Zadanie 5 Rysunek 1.5 Rozwiązanie. Rysunek 1.5.1 : Zaznaczamy prądy i s
HPIM0776 Rysunek 3.2B_________ Modułowy system do budowy urządzeń manipulacyjnych firmy WABCO. Robot
Rysunek 1.2: Idea działania systemu CDMA. Przykład dla trzech urządzeń nadawczych posługujących się
usm[1] I RYS 1 UKŁADY GRAWITACYJNE 1. ze zbiornikiem górnym przy ujęciu siąć roŁózceUzorufouaa ^CMii
pług 1 RYSUNEK 1.5. Pomocnicze zespoły robocze pługa: a - krój tarczowy, b - przedpłużek, c - korpus
61 (258) 4Szeregi zespolone Siódmy tydzień Przykłady Przykład 7.1 Zbadać zbieżność i zbieżność
CCF20100413�001 UKŁADY: GoSPODARZ-PASOZYT Rysunek 7.33. Ewolucja homeostazy w układzie żywiciel—paso
więcej podobnych podstron