8416073257
3. Teoretyczne podstawy programu
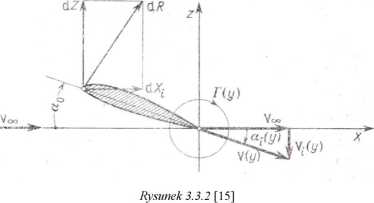
Każdy z wirów swobodnych („spływających” z końców płata) indukuje pole prędkości. Suma prędkości, wytworzona przez te wiry, na linii osobliwej zastępującej płat nośny nazywana jest prędkością indukowaną i w przyjętym układzie współrzędnych ma kierunek osi z (jest normalna do płaszczyzny wirowej). Zgodnie z przyjętymi w Rozdziale 1 konwencjami prędkość indukowana oznaczana jest symbolem V„ natomiast kąt zawarty pomiędzy prędkością strumienia niezaburzonego, a prędkością indukowaną nazywany jest indukowanym kątem natarcia [14] i oznaczany symbolem a,, kąt ten mierzony zgodnie z obrotem osi z do osi x. Wypadkowa prędkości indukowanej i prędkości strumienia niezaburzonego w funkcji współrzędnej rozpiętości oznaczona jest V(y), gdzie:
v(y)=v,(y)+r„ (3.3.i)
oraz:
I V A Vi
a,=arctanl——(3.3.2)
Na Rysunku 3.3.2 przedstawiony jest trójkąt prędkości oraz kąta natarcia indukowany kąt natarcia.
Wartość modułu prędkości dVh indukowanej w dowolnym punkcie linii nośnej nie będącym jej punktem końcowym poprzez elementarny wir swobodny wyraża się na mocy prawa Biota i Savarta [16] następującą zależnością:
dV =
(3.3.3)
Wyszukiwarka
Podobne podstrony:
3. Teoretyczne podstawy programu Natomiast moduł prędkości indukowanej przez wszystkie wiry swobodne
3. Teoretyczne podstawy programu3.2. Opływ płata o skończonym wydłużeniu - model wirowy Bryła
3. Teoretyczne podstawy programu Każda z linii wirowych, które tworzą powierzchnię wirową, wspomnian
3. Teoretyczne podstawy programu Moduł wypadkowej siły elementarnej dR wynosi: dR=pV(y)r(y)dy
3. Teoretyczne podstawy programu3.4. Metoda Glauerta Rozwiązanie równania 3.3.16 sprowadza się do
3. Teoretyczne podstawy programu Na Rysunku 3.4.1 przedstawione są wyniki obliczeń rozkładu cyrkulac
3. Teoretyczne podstawy programu3. Teoretyczne podstawy programu3.1. Teoria profilu cienkiego Dla pr
3. Teoretyczne podstawy programu Całkowita cyrkulacja wokół profilu wyrażona jest następującym
3. Teoretyczne podstawy programu Zakładając, że sinawa mierzony w radianach: (3.1.10) (3.1.11) •
PROGRAMOWANIE LINIOWE Teoretyczne podstawy programowania liniowego Znaleść maksimum (minimum)
1 Teoretyczne podstawy działalności kulturalno-oświatowej Program i konspekt - wykłady • Dyscypliny
Języki programowania-podstawowe cechy ■ Każdy język programowania jest określony przez swoją
Podstawy programowania robotów Realizacja ruchu końcówki roboczej manipulatora Automatyczny ruch
6. Program A. Treść wykładów Tematyka zajęć Liczba godzin Teoretyczne podstawy obróbki
Piotrków T. 28 09 2009 Teoretyczne podstawy wychowania (Ramowy program przedmiotu) Cele nauczania: w
Piotrków T. 28 09 2009 Teoretyczne podstawy wychowania (Ramowy program przedmiotu) Cele nauczania: w
Kazimierz Pospiszyl TEORETYCZNE PODSTAWY ORAZ PRZYKŁADY PROGRAMÓW ODDZIAŁYWAŃ Wydawnictwo
• Pospiszyl K Resocjalizacja teoretyczne podstawy, oraz przykłady programów
Podstawowe zasady prawa pracy I każdy ma prawo do podjęcia pracy; I każdy ma swobodę nawiązywania
więcej podobnych podstron